Схема регулятора положения с использованием электропривода подачи приведена на рис. 1.
ВВЕДЕНИЕ
В настоящее время в промышленности все большее применение получают тиристорные преобразователи, выполняемые на базе автономных инверторов напряжения (АИН). Из областей применения таких преобразователей можно назвать электропривод переменного тока и регулируемые по напряжению (а иногда и по частоте) источники переменного тока. АИН допускают несколько принципиально различных способов регулирования выходного напряжения: регулирование выходного напряжения по цепи питания, регулирование методами широтно-импульсной модуляции (ШИМ) и широтно-импульсный способ регулирования (ШИР). Регулирование выходного напряжения по цепи питания производится использованием на входе АИН управляемого выпрямителя либо импульсного преобразователя постоянного напряжения.
Регулирование выходного напряжения методами ШИМ осуществляется внутренними средствами инвертора путем формирования кривой выходного напряжения в виде импульсов переменной за период длительности (промодулированных по синусоидальному или близкому к нему закону). Регулирование достигается изменением коэффициента модуляции. Преимуществом этого вида регулирования является возможность получения близкой к синусоиде формы кривой выходного напряжения (или тока), что существенно для работы, например, асинхронных электродвигателей при низких и сверхнизких скоростях. Однако вследствие повышенной кратности частоты коммутации к выходной частоте инвертора потери энергии в инверторе получаются большими, чем при других видах регулирования. Кроме того, из-за большого числа пауз в кривой выходного напряжения инвертора использование питающего напряжения для получения требуемого значения выходного напряжения (первой гармоники) при ШИМ недостаточно, что отрицательно сказывается на установленной мощности оборудования. В связи с указанным методы ШИМ находят применение при сравнительно низких частотах выходного напряжения (до 50-70 Гц). Недостаток АИН с ШИМ – сложность их систем управления, обусловленная применением сложных регулируемых по частоте и напряжению трехфазных задающих генераторов синусоидального напряжения.
Широтно-импульсный способ регулирования, как и ШИМ, также осуществляется внутренними средствами инвертора. Однако его отличие от ШИМ заключается в том, что выходное напряжение здесь формируется в виде импульсов одинаковой за период длительности. Регулирование осуществляется путем изменения длительности (ширины) импульсов. Кривая выходного напряжения при ШИР в зависимости от требуемого гармонического состава может формироваться как с малым, так и с большим числом импульсов за период. При необходимости регулирования частоты и напряжения в широких пределах АИН с ШИР обеспечивают благоприятные энергетические показатели на верхнем пределе регулирования за счет возможного уменьшения числа импульсов за период. Верхний предел регулирования частоты при этом может достигать 200-300 Гц. Автономные инверторы напряжения с ШИР по сравнению с ШИМ допускают лучшее использование питающего напряжения. Они отличаются также более простой системой управления, так как здесь нет необходимости в применении задающего генератора трехфазного синусоидального напряжения. Вместе с тем ШИР выходного напряжения АИН является и наименее изученным.
Основной особенностью ШИР является большое многообразие способов формирования кривой выходного напряжения (алгоритмов переключения силовых тиристоров), обеспечивающих этот вид регулирования.
1. УСТРОЙСТВО И РАБОТА
1.1 Принцип работы электропривода
Электропривод реализован в соответствии с частотно-токовым способом управления, сущность которого заключается в том, что в статорных обмотках двигателя формируется, изменяющаяся по трехфазному закону система токов, амплитуда которых зависит от заданного или регулируемого тока намагничивания и активного тока, пропорционального требуемому вращающему моменту, а частота токов статора равна алгебраической сумме двух частот: частоты вращения ротора и частоты скольжения. В результате взаимодействия вращающегося магнитного поля с током в короткозамкнутой обмотке ротора возникает вращающий электромагнитный момент. Согласованное управление амплитудой и фазой тока в функции требуемого момента с учетом углового положения ротора позволяет получить регулировочные характеристики, аналогичные характеристикам привода с двигателем постоянного тока в широком диапазоне частоты вращения и момента, а по допустимой частоте вращения и быстродействию - превзойти их.
Схема
регулятора
положения с
использованием
электропривода
подачи приведена
на рис. 1.
Рис. 1. Структурная схема привода подачи с частотно-токовым управлением
Регулятор положения выполнен по структуре системы подчиненного регулирования и содержит:
1. контуры регулирования фазных токов асинхронного двигателя, выполненные с отрицательной обратной связью по току;
2. контур регулирования частот вращения с отрицательной обратной связью по частоте вращения;
3. контур регулирования положения с отрицательной обратной связью по положению, которая замыкается через устройство числового программного управления, а информация о положении вводится с помощью импульсных сигналов перемещения sin, cos и сигнала нуль-метки НМ, формируемых в блоках электропривода;
4. вспомогательная контур с положительной обратной связью по угловому положению вала двигателя, которая осуществляется путем интегрирования импульсных сигналов частоты вращения вр и воздействует на соответствующие функциональные преобразователи привода;
5. вспомогательный контур с положительной обратной связью по э.д.с. двигателя, которая осуществляется путем нелинейных преобразований аналогового сигнала частоты вращения АС1, сигнала задания тока возбуждения Тв и сигнала, пропорционального напряжению питания инвертора НПИ.
Регулятор фазных токов содержит усилитель рассогласования УР, модулятор М, транзисторный инвертор и датчик мгновенного значения тока ДТ (в регуляторе фазы С привода подачи датчик тока не используется). На вход усилителя рассогласования УР регулятора подается сигнал задания фазного тока ТЗА (ТЗВ) и сигнал э.д.с. двигателя UeA (UeB), по цепи отрицательной обратной связи сигнал фактического значения фазного тока ТА (ТВ) компенсирует только среднее значение сигнала ТЗА (ТЗВ), поэтому сигнал э.д.с. проходит без искажений и совместно с сигналом разности мгновенных значений ТЗА и ТА (ТЗВ и ТВ) воздействует на модулятор М. В модуляторе М этот суммарный сигнал сравнивается по уровню с сигналом от источника опорного напряжения Uoп и преобразуется в широтно-модулированный сигнал, который управляет транзисторным инвертором. Нагрузка транзисторного инвертора имеет индуктивный характер и содержит источник противо-э.д.с. Величина противо-э.д.с. зависит от магнитного потока в двигателе и частоты вращения. В функции широтномодулированного сигнала управления транзисторным инвертором вывод фазной обмотки подключается либо к положительному, либо к отрицательному силовому выводу источника постоянного напряжения. Под воздействием разности между приложенным к обмотке напряжением и противо-э.д.с. в обмотке развивается ток, величина которого регистрируется датчиком тока ДТ и передается на вход регулятора для соответствующей коррекции управляющего сигнала. (Более подробно процессы регулирования тока и особенности исполнения регулятора фазы С описаны в подразделе "Контур регулирования тока"). Усилители рассогласования, модуляторы, частично элементы схемы датчика тока входят в блок регулятора привода подачи РПП1.
Контур регулирования частоты вращения обеспечивает соответствие между заданным значением частоты вращения (сигнал V) и ее фактическим значением (сигнал АС1). Если существует соответствие между сигналами V и АС1, то это свидетельствует о том, что развиваемый двигателем вращающий момент достаточен для поддержания заданного значения частоты вращения. Сравнение сигналов V и АС1 по величине и полярности осуществляется усилителем регулятора•частоты вращения УРЧВ, имеющим амплитудно-частотную характеристику коэффициента передачи пропорционально-интегрального звена (ПИ-регулятора). Такой регулятор исключает статическую ошибку в отработке заданного значения частоты вращения; в переходных процессах отработки нового заданного значения частоты вращения или изменения момента сопротивления нагрузки заданная и фактическая частоты вращения не совпадают. Частотные свойства электропривода, которые во многом определяют динамические погрешности отработки входных и возмущающих воздействий, зависят от частотных характеристик кинематической цепи: механизм-передача (шарико-винтовая пара, редуктор, муфта) - вал двигателя, поэтому предусмотрена коррекция коэффициента передачи УРЧВ.
Контур с положительной обратной связью по угловому положению вала двигателя необходим для реализации частотно-токового способа управления асинхронным двигателем. Информация об угловом положении необходима для того, чтобы в функциональном преобразователе были правильно определены мгновенные значения фазных токов: соотношение между ними должно подчиняться трехфазной системе синусоидальных функций, у которых основной переменной составляющей является угловое положение ротора. Исходную информацию об угловом положении вначале получают в виде фазы 2α сигнала sin (ωt+2α), где ω - круговая частота, t - время, 2 - число пар полюсов фазовращателя ФВ, α - угол поворота ротора двигателя, а затем из-за принятой схемной реализации функционального преобразователя фазу 2α преобразовывают в количество импульсов в сигнале ωвр /4000 за один оборот вала двигателя/ и пропускают через интегратор, выполненный с помощью реверсивного счетчика объемом 2000 бит и таким образом восстанавливают значение фазы 2α.
Вращающий момент в асинхронном двигателе возникает в результате взаимодействия магнитного потока, пронизывающего статор и ротор двигателя, и тока в короткозамкнутой обмотке ротора. Ток в этой обмотке зависит от разности частот вращения ротора двигателя и магнитного потока, эта разность называется частотой скольжения. Если двигатель подключен к сети переменного тока, и нагрузка на валу двигателя отсутствует, по обмоткам двигателя течет ток, которым создается только магнитный поток, и этот ток принято называть током возбуждения Тв, частота вращения вала теоретически должна совпадать с синхронной частотой, равной 1500 мин-1 для используемых в приводе асинхронных двигателей с двумя парами полюсов. При возникновении нагрузки на валу двигателя частота вращения ротора уменьшается, благодаря возникшей частоте скольжения в роторных обмотках возникнет э.д.с., следовательно, и ток. В статорных обмотках также возникнет дополнительная составляющая тока, которая по фазе будет сдвинута относительно тока возбуждения на угол ¶/2. Эту составляющую тока называют активным током Та. Ток в статорной обмотке будет равен не алгебраической сумме тока возбуждения и активного тока, а векторной сумме двух взаимно перпендикулярных векторов Тв и Та. Таким образом в асинхронном двигателе, подключенном к сети переменного тока, требуемый момент вращения создается за счет изменения частоты вращения, а в регулируемом приводе ток в статоре и частота скольжения должны формироваться таким образом чтобы частота вращения при изменении нагрузки оставалась неизменной.
Для описания процесса регулирования принято трехфазную магнитную систему асинхронного двигателя представлять в виде двухфазной системы, магнитные оси d и q которой взаимно перпендикулярны. Ток статора представляют как вектор, проекция которого на ось d - ток намагничивания, а на ось q -приведенное значение тока ротора –(активный ток).
Согласно частотно-токовому способу для управления моментом, развиваемым асинхронным двигателем, необходимо:
1. сформировать задание тока намагничивания (возбуждения) и пропорциональную ему составляющую тока статора Тв;
2. сформировать задание тока ротора Uq и пропорциональную ему составляющую тока статора Та;
3. сформировать составляющую частоты токов статора, равную частоте скольжения fc и определяемую величиной Uq/Ud[1+αt(t-to)] , где αt - температурный коэффициент удельного сопротивления обмотки ротора, t - температура обмотки электродвигателя, to - уставка, равная 20 °С;
4. сформировать составляющую частоты токов статора, равную, частоте вращения вр;
5. сформировать сигнал задания тока статора Тзс, амплитуда которого равна
![]() ,
а фаза
φ=arctg
,
а фаза
φ=arctg
 ,
,
где К1, K2 - коэффициенты пропорциональности;
6. сформировать задание по амплитуде, фазе и частоте фазных токов асинхронного двигателя (перейти от двухфазной dq-системы к трехфазной магнитной системе, которая образуется обмотками двигателя). Схема формирователя сигналов задания фазных токов в приводе подачи приведена на рис. 2.
Рис. 2. Схема формирователя сигналов задания фазных токов в приводе подачи
Сигнал Uq формируется на выходе ПИ-регулятора и отличается от сигнала Uq на величину погрешности, вносимой блоком умножения. Векторное суммирование составляющих Тв (ив) и Та (Up) эквивалентно суммированию с помощью операционного усилителя 9К сигналов синусоидальной формы несущей частоты ω=2¶f=2¶ ·2000 с-1 и отличающихся по фазе на угол ¶/2 (сигналы sin ω t и cos ω t), амплитуды которых соответственно пропорциональны Uq и Ud, а фаза φ зависит от их полярности и отношения Uq/Ud. Сигнал Ue, пропорциональный э.д.с. двигателя, суммируется как вектор, перпендикулярный оси d, потому что э.д.с. опережает по фазе магнитный поток на угол ¶/2.
Частота тока статора равна алгебраической сумме двух частот, одна из которых пропорциональна частоте вращения ротора 2fвр, где 2 - число пар полюсов асинхронного двигателя, а вторая - частота скольжения fc, которая, вводится со знаком плюс, когда двигатель должен развивать движущий момент, и со знаком минус, когда двигатель тормозится. В статике для создания компенсирующего момента частота скольжения учитывается со знаком, противоположным знаку возмущающего момента со стороны ротора двигателя.
Частота скольжения в асинхронном двигателе выполняет функцию разложения фазного тока на составляющие: ток возбуждения (намагничивания) и ток, который трансформируется в ротор и создает вращающий момент (активный ток). Синхронное регулирование сигналом частоты скольжения и составляющей фазного тока, пропорциональной току ротора, обеспечивает разложение фазного тока на составляющие, заданные сигналами Ud и Uq.
При изменении температуры обмотки ротора частота скольжения должна пропорционально изменяться.
Схемное решение фазорасщепителя и частотного преобразователя требует, чтобы в его входных сигналах K0 и К120 содержалась несущая частота f, скорректированная на величину, равную частоте токов статора (2fвр±fc), знак коррекции определяется направлением вращения ротора. Кроме того, импульсные сигналы f±(2fвр±fc) должны отличаться по фазе на угол 2¶/3 для того, чтобы перейти к трехфазной системе, в которой осуществляется задание фазных токов ТЗА, ТЗВ и фазных э.д.с. UeA, UeB двигателя.
Рассмотрим взаимодействие всех контуров регулирования на нескольких примерах. Отработке заданного значения частоты вращения предшествует интервал времени, в течение которого в двигателе формируется магнитный поток. Сигнал Uв соответствует номинальному значению тока возбуждения, значение сигналов Up, AC1, Ue, fвр, fc равно нулю. Сигналами ТЗА и ТЗВ будут заданы значения фазных токов, соотношение которых соответствует произвольному значению фазового угла трехфазной системы синусоидальных функций. Например, для фаэд ¶/6 значения сигналов ТЗА (ТЗС) и ТЗВ будут соответственно равны 0,5 Iвн и минус Iвн, где Iвн - номинальное значение тока возбуждения. Эти значения токов будут воспроизведены регуляторами, и в обмотках двигателя будет протекать постоянный ток. Если к валу двигателя будет приложено усилие, создающее попытку провернуть его, то возникнут сигналы АС1, fвр (вр), Uq, под действием которых сигналы ТЗА, ТЗВ, ТЗС начнут изменяться по амплитуде и фазе; в результате этих изменений в двигателе возникнет вращение магнитного потока и, как следствие, возникновение вращающего момент препятствующего внешнему воздействию. После компенсации внешнего воздействия сигналы АС1 и fвр (вр) становятся равными нулю, а сигнал Uq за счет ПИ-регулятора сохранит требуемое значение и через формирователь частоты скольжения будет создавать вращение магнитного потока в двигателе и таким образом поддерживать равенство моментов на вал двигателя.
При задании на вход УРЧВ сигнала задания частоты вращения V сигнал Uq, как правило, принимает максимальное значение, соответствующее максимальному вращающему моменту, так же изменяется сигнал Тзс, и через формирователь частоты скольжения с максимальным темпом начинается вращение магнитного потока, которое вызовет вращение ротора со все возрастающей частотой. Начинают формироваться сигналы АС1, вр, Ue, которые поддерживают по соответствующему контуру процесс формирования требуемых значений промежуточных сигналов, следовательно, и токов в двигателе. К моменту равенства сигналов V и АС1 и при наличии нагрузки в двигателе будет поддерживаться вращающееся магнитное поле с частотой, равной сумме частоты вращения и частоты скольжения, а частота вращения ротора двигателя будет соответствовать заданной.
2. УСТРОЙСТВО И РАБОТА СОСТАВНЫХ ЧАСТЕЙ
В качестве источника энергии в Силовых цепях транзисторных инверторов электроприводов переменного тока используются источники постоянного напряжения, обладающие способностью отдавать и накапливать электрическую энергию. Совокупность блоков тиристорного выпрямителя, тиристорного инвертора, емкостных накопителей энергии, аппаратов и схем автоматической защиты и блоков управления образует в составе электропривода звено постоянного напряжения.
Звено постоянного напряжения обеспечивает:
1. формирование силовой сети постоянного напряжения посредством выпрямления переменного напряжения трехфазной сети 380 В и фильтрации выпрямленного напряжения;
2. рекуперацию накопленной энергии вращающихся, масс механизмов станка и электропривода в сеть переменного тока;
3. быстродействующую защиту при аварийных режимах в силовых цепях транзисторных инверторов и тиристорного инвертора;
4. формирование высоковольтного постоянного напряжения для источников вторичного питания (блок ИП);
5. предварительный заряд конденсатора LC-филътра, конденсаторов защитных цепей;
6. возможность управляемого торможения электроприводов при отключении сети переменного тока;
7. контроль величины напряжения на конденсаторах LC-фильтра и контроль величины тока в режимах рекуперации и потребления от сети;
8. возможность бесконтактного отключения сети переменного тока от внутренней силовой сети постоянного напряжения.
В состав звена постоянного напряжения входят следующие функциональные группы:
два блока тиристорных выпрямителей (БТ), собранных по трехфазной мостовой схеме (один блок используется в качестве сетевого управляемого выпрямителя "В", другой - в качестве сетевого инвертора "И");
блок реакторов, содержащий индуктивность LC-фильтра в составе сетевых реакторов L1...L3 и магнитосвяэанные дроссели L4.1 и L4.2, резисторы R1...R12, ограничивающие ток рекуперации, короткозамыкатель V2;
При включенном выключателе QF2 переменное напряжение 380 В подается на мостовой трехфазный выпрямитель VI...V6 и трансформаторы Т1...ТЗ (расположены на панели трансформаторов ПТ), на выходах которых формируются соответственно постоянное напряжение 540 В и оперативное трехфазное напряжение 10 В, необходимые для функционирования блока ИП. Происходит включение блока ИП, и на блоки управления подаются напряжения 5 В, 15 В, минус 15 В и переменное напряжение прямоугольной формы частотой от 560 до 1040 Гц (сигнал питания ключей ПК). За счет выделения цепей питания блока ИП из силовой сети постоянного напряжения создаются условия для автоматического частичного контроля функционирования блоков управления перед включением силовых цепей транзисторных инверторов, а также обеспечивается возможность отключения силового питания транзисторных инверторов без отключения питания блоков управления.
Если при частичном контроле не выявлены неисправности в блоках управления и подан сигнал оперативного управления приводами ОУП1, то начинается цикл включения силового питания электроприводов. Цикл включения - это время заряда конденсаторов С1...СЗ0 импульсами тока от 70 до 90 А за счет изменения от нуля до 120 эл. град, с определенным темпом угла зажигания тиристоров сетевого управляемого выпрямителя (блок БТ "В"). Напряжение на конденсаторах за время цикла включения возрастает до 540 В, а управляемый выпрямитель переходит в режим управления с постоянным углом зажигания тиристоров. В этом режиме выпрямитель аналогичен мостовому выпрямителю на диодах.
При торможении главного привода накопленная кинетическая энергия вращающихся масс преобразуется в электрическую и происходит заряд конденсаторов С1...СЗ0 со стороны нагрузки (транзисторных инверторов), в результате напряжение на них становится больше напряжения сети. Если эта разность превысит 30 В, формируется сигнал разрешения включения инвертора РВИ. По сигналу РВИ управляющие импульсы с сетевого выпрямителя снимаются и управление подается на сетевой инвертор (блок БТ "И" ). Отдача энергии из эвена постоянного напряжения в сеть переменного тока происходит до тех пор, пока напряжение на конденсаторах С1...СЗ0 не достигнет значения меньше амплитуды линейного напряжения трехфазной сети на 60 В, В этот момент формируется сигнал РВВ, режим, инвертирования сменяется режимом выпрямления и напряжение на конденсаторах возрастает.
Рекуперация энергии в сеть невозможна при отсутствии напряжения сети, а также при кратковременном (на несколько периодов) уменьшении напряжения сети по отношению к напряжению на конденсаторах С1...СЗ0 более чем на 15 % во время рекуперации. Если торможение происходит при отсутствии (в результате отключения) напряжения сети, то управление главным приводом блокируется,, а управление приводами подачи осуществляется в цикле аварийного управляемого останова АУО. Цикл АУО характеризуется тем, что в процессе останова приводов подачи торможение (отдача энергии) сменяется разгоном (потребление энергии), а затем вновь следует торможение - разгон - торможение и так - до полного останова; за счет чередующихся разгонов накопленная энергия преобразуется в тепловую и расходуется в виде потерь в механизмах.
На диаграммах (рис. 3) условно показано изменение частоты вращения приводов (сигнал АС) и соответствующее ему изменение напряжения на конденсаторах С1...СЗ0. Чередование торможения с разгоном необходимо для предотвращения возрастания напряжения до 675 .В, при котором формируется сигнал превышения напряжения ПН, вызывающий блокировку управления приводами, в результате чего происходит их неуправляемый останов.
На рис. 3 приведена схема формирования сигналов в цикле АУО или по сигналу оперативного управления приводами ОУП1. В блоке источника питания ИП реализованы схемы контроля величины напряжения на конденсаторах С1...СЗ0, которыми формируется сигнал низкого напряжения НН, если напряжение на конденсаторах становится меньше 380 В и сигнал напряжения питания инвертора НПИ, величина которого изменяется в пределах /6,6±1,6/ В и пропорциональна напряжению на конденсаторах С1. . .СЗ0.
После отключения напряжения в сети приводы потребляют энергию, поэтому напряжение на конденсаторах снижается, что приводит к формированию сигнала НН. По сигналу НН блокируется управление главным приводом, формируется сигнал запрета управления выпрямителем и инвертором ЗУВИ и сигнал отключения задания частоты вращения ОЗЧВ приводов X и Z. Приводы подачи начинают тормозиться, процесс сопровождается отдачей энергии в звено постоянного напряжения, поэтому напряжение на конденсаторах С1...СЗ0 возрастает. Когда напряжение на конденсаторах С1...СЗ0 превысит на 30 В напряжение на конденсаторах Cl, C12, формируется сигнал РВИ. Привод подачи увеличивает частоту вращения, потребляя при этом энергию, запасенную в конденсаторах С1,,.СЗ0, и уменьшая напряжение на них. Затем процессы повторяются до полной остановки обоих приводов подачи.
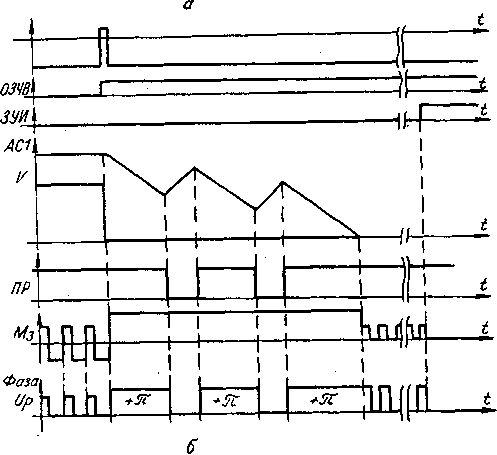
Рис. 3. Формирование сигнала тока ротора - диаграммы сигналов в случае аварийного управляемого останова по сигналу НН
Сетевой тиристорный инвертор выполнен по схеме инвертора, ведомого сетью. Уровень ограничения мгновенных значений тока и значение среднего тока рекуперации определяется величиной эквивалентного сопротивления группы параллельно включенных резисторов R1...R12 блока реакторов.
С целью ограничения скорости нарастания тока рекуперации в цепь тока включены дроссели Ll.l, L2.1, L3.1.
Отказы элементов в блоках управления транзисторных инверторов или увеличение нагрузки на инверторы могут привести к появлению в силовых цепях токов, достигающих нескольких сотен ампер.
Одновременно с включением тиристора V2 в блоке реакторов включаются прерывающие тиристоры VI7 и VI8, с помощью которых осуществляется прерывание тока в проводящих в данный момент вентилях сетевого выпрямителя. Тиристором VI7 предварительно заряженные конденсаторы С6, С7 подключаются к проводящему вентилю катодной группы мостового тиристорного выпрямителя (блок БТ "В") и создают через этот вентиль ток обратного направления, что приводит к запиранию вентиля. Тиристор VI8 подключает предварительно заряженные конденсаторы С8, С9 к соответствующему вентилю анодной группы, в котором происходит аналогичный процесс выключения.
Токи, существующие в реакторах до включения тиристора V2 блока реакторов и увеличившиеся в процессе прерывания токов через вентили сетевого выпрямителя, замыкаются через элементы блока ВЗЗ: выпрямитель на диодах VH...V16, тиристоры V17 и V18, конденсаторы С4...С7 и С8...С11 и элементы блока реакторов (магнитосвяэанные дроссели L4.1 и L4.2 и тиристор V2). В результате перераспределения энергии между индуктивнос-тями L1,,.L3 блока реакторов и конденсаторами С4, С5 и С10, С11 ток через тиристоры V17 и VI8 уменьшается до величины, меньшей тока удержания тиристора, и тиристоры запираются. На этом процесс отключения силовых цепей транзисторных инверторов от сети переменного тока заканчивается.
Если в силовой цепи тиристорного инвертора со стороны постоянного напряжения развивается ток, по величине превышающий устав-ку максимальной токовой защиты, то защита осуществляется включением тиристора V2.
В случае отказов в схеме защиты реакторы L1...L3 ограничивают ток короткого замыкания на уровне (0,7-1,0) кА, Этот ток прерывается вводным автоматическим выключателем QF1 . Выключатель QF1 отключает также ток, возникающий в цепях сетевого инвертора (блок БТ "И") если его эффективное значение превышает уставку максимальной токовой защиты 90 А.
Ряд элементов имеет собственные защитные цепи. Так, с помощью диода VI в блоке реакторов уменьшается рассеиваемая мощность на резисторах R19, R20 в рабочем режиме.
Отключение электропривода от сети переменного тока, т.е. отмена команды ОУП1 реализуется блокировкой управления сетевым управляемым выпрямителем "В" и сетевым инвертором "И". После отмены команды ОУП1 снижение напряжения на конденсаторах С1...СЗ0 до безопасного уровня происходит с разным темпом в зависимости от состояния привода:
1. если к моменту отмены команды ОУП1 были отменены команды на включение привода подачи /ВПП/ и все приводы остановлены, то происходит медленный разряд конденсаторов за счет токов утечки самих конденсаторов;
2. если к моменту отмены команды ОУП1 главный привод был включен, а двигатели приводов подачи вращались, то останов приводов подачи происходит в цикле аварийного управляемого останова АУО; в конце цикла АУО уровень напряжения на конденсаторах остается достаточно большим, а снижение до безопасного уровня происходит за счет тока утечки так же медленно;
3. если происходит отключение питающей сети, то независимо от состояния сигнала ОУП1, выполняется цикл АУО, и после его завершения напряжение на конденсаторах снижается примерно до уровня 360 В за счет потребления источником питания ИП, после чего блок питания отключается, но перед отключением автоматически подается команда на включение шунтирующего тиристора, подключенного параллельно конденсаторам С1...СЗ0, в результате чего происходит практически мгновенный их разряд до безопасного уровня.
Только отмена команды ОУП1 обеспечивает безопасный доступ в зону резания, т.к. исключает самопроизвольное включение электропривода.
Безопасный доступ внутрь шкафа возможен только после снижения напряжения на конденсаторах С1...СЗ0 до безопасной величины;
контроль напряжения осуществляется вольтметром.
Останов двигателей работающих приводов происходит за наименьшее время, если до отмены команды ОУП1 отменены команды на включение этих приводов.
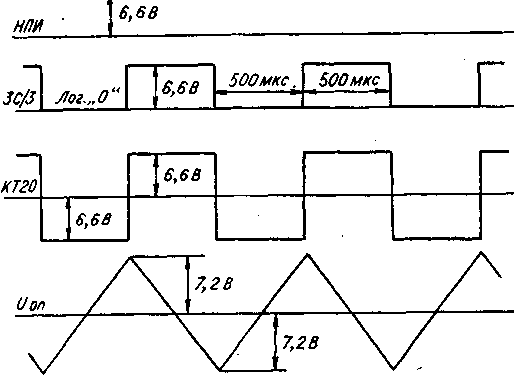
2.2. Формирователь опорного напряжения
Опорное напряжение Uоп для широтно-импулъсных модуляторов контура регулирования тока формируется треугольной формы частотой 1 кГц с амплитудой, зависимой от величины выходного напряжения эвена постоянного напряжения. Информация о величине напряжения содержится в амплитуде сигнала "Напряжение питания инвертора" НПИ. Диаграммы сигналов формирователя опорного напряжения приведены на рис.4. Формирователь содержит RC-интегратор, выполненный на операционном усилителе 10R, на вход которого подается знакопеременное напряжение частотой 1 кГц с амплитудой, равной величине сигнала НПИ. Знакопеременное напряжение формируется операционным усилителем 9L, который по неинвертирующему входу переключается из режима инвертора (лог. "0" на выходе 3 элемента ЗС) в режим повторителя (лог. "1" на выходе 3 элемента ЗС).
Рис. 4. Диаграммы работы формирователя опорного напряжения
При частотно-токовом способе управления асинхронным двигателем в его фазных статорных обмотках формируется изменяющаяся по величине и частоте система трехфазных токов. Характеристики привода тем лучше, чем ближе к синусоиде форма фазного тока. Частота этих токов может изменяться от нуля до 67 Гц в приводе подачи или до 150 Гц -в главном приводе; амплитуда тока может достигать 25 А в приводе подачи и 50 А - в главном приводе. Такие параметры могут быть получены с помощью импульсных усилителей с полностью управляемыми полупроводниковыми ключами (прерывателями), которые позволяют регулировать длительность подключения фазной обмотки к силовому источнику напряжения. В зависимости от длительности воздействия разности напряжений силового источника и э.д.с вращения на индуктивность фазной обмотки в последней формируется то или иное значение тока. Контролируя эту величину тока и сравнивая ее с заданной, можно реализовать автоматический регулятор тока. Как показано на рис. 1, контур регулирования тока содержи: усилитель рассогласования УР, модулятор J транзисторный инвертор и датчик тока. Усилители рассогласования, модуляторы и част но схемы датчиков тока входят в состав блока регулятора привода подачи РПП1.
Описание работы контура регулирования тока и его элементов выполнено в следующей последовательности:
1. структурная схема трехфазного регулятора тока, взаимодействие ее элементов и взаимозависимость между входными, выходными и промежуточными сигналами;
2. структурная схема датчика тока, описание принципа работы и схемной реализации
3. структурная схема управляющей части регулятора тока в блоке РПП1 (привод подачи и описание схемной реализации усилителя рассогласования, формирователя импульсов управления силовыми ключами, схемы контроля тока и схемы управления работой блока в различных режимах;
На рис. 5 приведена структурная схема трехфазного регулятора тока привода подачи. На вход регулятора подаются сигналы задания ТЗА+UeA, ТЗВ+UeB для двух фаз, которые сравниваются с соответствующими сигналами фактического значения тока ТФА, ТФВ и на выходе усилителей А формируются сигналы рассогласования UpA, UpB. В трехфазной системе задание для третьей фазы может быть получено путем суммирования сигналов задания двух других фаз, так же формируется сигнал фактического тока третьей фазы, который согласно
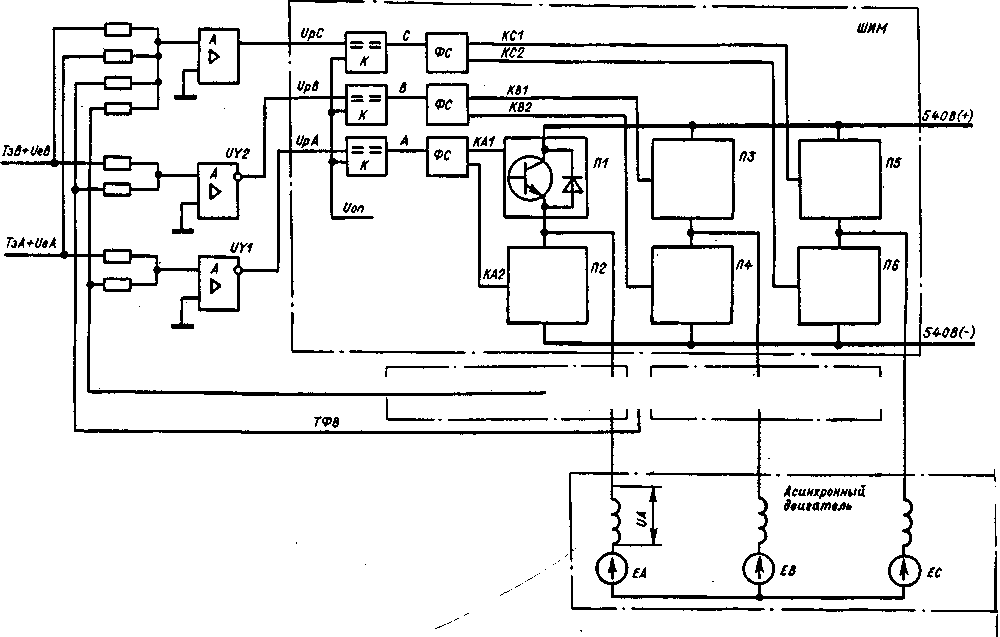
Рис. 5. Трехфазный регулятор тока привода подачи
закону Кирхгофа для узла электрической цепи не может иметь другого значения. Знак (направление) тока в третьей фазе должен быть обратным относительно знака, полученного при алгебраическом суммировании, поэтому сигнал рассогласования UpC инвертируется. Функцию модулятора выполняют компараторы К и формирователи сигналов управления ФС. Транзисторный инвертор выполнен по трехфазной мостовой схеме с помощью шести прерывателей П1...П6. Фазные статорные обмотки асинхронного двигателя соединены в "звезду" и как нагрузка представляют собой последовательное соединение индуктивности и источника э.д.с. В подобных мостовых схемах характер изменения тока в нагрузке определяется не только состоянием прерывателей, непосредственно подключенных к обмотке, но и состоянием прерывателей двух других полумостов. Такое же сложное влияние оказывают и источники э.д.с. двух других фаз. Однако благодаря относительно высокой частоте модулирующего сигнала - опорного напряжения Uoп частотой 1 кГц, высокому быстродействию датчиков тока и контура регулирования тока в целом регулятор способен с высокой точностью воспроизводить в нагрузке заданную систему синусоидальных токов.
Диаграммы на рис. 6 идеализированы и приведены для иллюстрации качественных соотношений между сигналами рассогласования и опорным напряжением, между соотношением сигналов А, В, С на выходе компараторов и напряжением, приложенным к обмотке фазы А. Диаграммы на рис. 7 дают представление о зависимости темпа изменения фазного тока Iф от разности между э.д.с. и напряжением, приложенным к обмотке. Кривая, обозначенная Iфо, характеризует огибающую (среднее значение) фазного тока, который воспроизводит сигнал заданного тока. Пульсирующая составляющая тока имеет среднюю частоту 2 кГц, амплитуда ее не превышает 2,5 А, и эта составляющая оказывает влияния на качество регулирования момента и частоты вращения, увеличивает только потери в транзисторном инверторе в обмотках двигателя и в конденсаторах С1...СЗО фильтра звена постоянного напряжения.
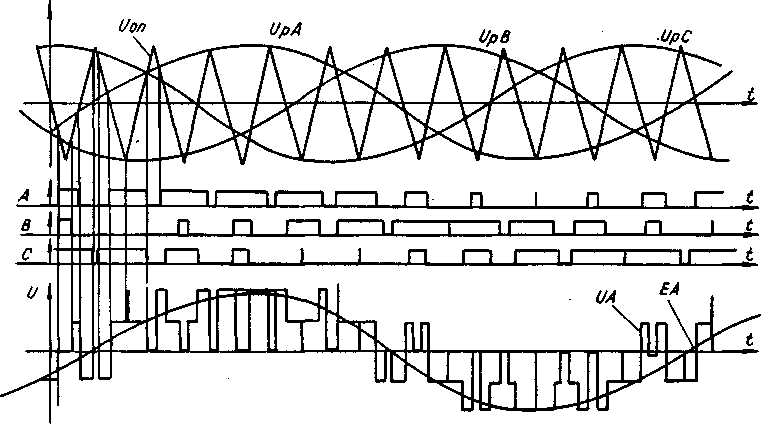
Рис. 6. Диаграммы сигналов рассогласования и опорного напряжения выходных сигналов компараторов и напряжения на обмотке фазы А трехфазного регулятора тока
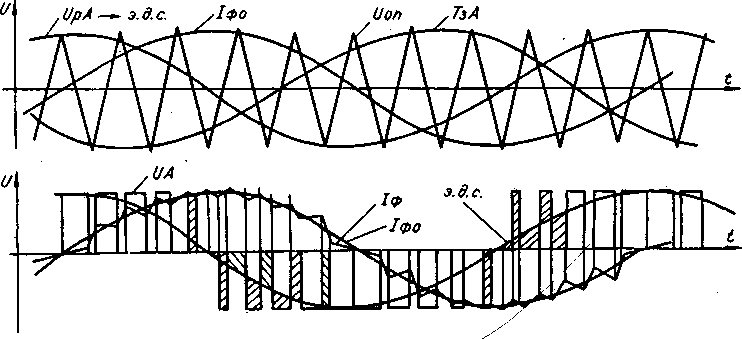
Рис. 7. Диаграммы сигналов регулятора тока при регулировании тока возбуждения
2.4. Регулятор тока в блоке РПП 1
На рис. 8 приведена структурная схема управляющей части регулятора тока в блоке РПП1 (привод подачи). Кроме элементов, показанных ранее на рис. 5, к ним относятся схема контроля превышения тока и схема управления ; формирователь сигнала тока ФСТ обобщенно представляет описанные ранее элементы датчика тока ФЗТ и ФЧВ. Сигналы тока TAl, TB1 подаются на входы усилителей рассогласования через RC-фильтры Ф.
Усилители рассогласования UY1, UY2 имеют зависимый от величины выходного сигнала коэффициент передачи. При уровнях сигнала Up, превышающих 0,7 В, коэффициент передачи равен отношению величины сопротивления резистора R128 к величине сопротивлений входных резисторов, при меньших значениях выходного напряжения коэффициент пропорционально интегральный. Изменение характеристики коэффициента передачи достигается шунтированием интегрирующего конденсатора 0,047 мкФ диодами V31, V32. Увеличенный коэффициент при небольших значениях сигнала Up позволяет с большей точностью воспроизводить значения тока нагрузки при переходе сигнала Ue через нулевое значение. Усилитель рассогласования в фазе С содержит инвертор с единичным коэффициентом передачи, который необходим в регуляторе третьей фазы, если сигнал задания и сигнал обратной связи по току получают к сумму соответствующих сигналов двух других фаз.
В качестве компаратора при сравнении сигналов Up и опорного напряжения Uoп используется элемент типа К554САЗБ. Сигналы рассогласования Up на вход 4 компараторов подаются через RC-фильтр (резистор R147, конденсатор С49).
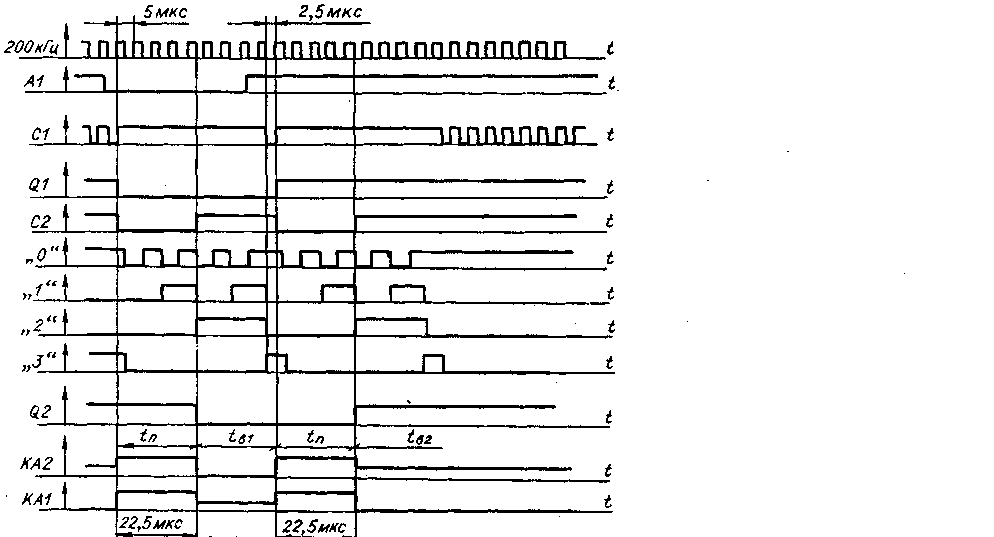
Выходные сигналы А, В, С компараторов не могут непосредственно использоваться для управления транзисторными прерывателями П1...П6 (см. рис. 5). Управление каждой парой последовательно включенных прерывателей П1 и П2 (ПЗ и П4; П5 и П6) должно выполняться в следующей последовательности: размыкается замкнутый прерыватель - выдержка времени
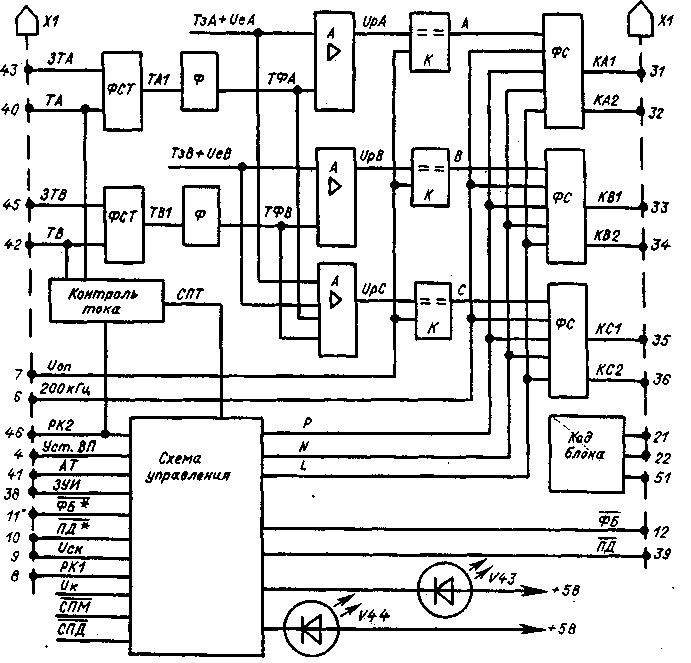
Рис. 8. Структурная схема управляющей части регулятора тока в блоке РПП 1 (привод подачи)
(пауза) - замыкается разомкнутый прерыватель. Величина паузы 22,5 мкс достаточна для полного прерывания тока в том прерывателе, который в предыдущем интервале был в состоянии ВКЛЮЧЕНО; благодаря паузе не может возникнуть ток, протекающий через транзисторы в двух последовательно включенных прерывателях (сквозной ток). Состояние прерывателей в различные моменты времени определяется сочетанием уровней напряжений каждой пары сигналов КА1 и КА2; КВ1 и КВ2; КС1 и КС2. На рис. 9 на примере пары сигналов КА1 и КА2 показаны интервалы, соответствующие состояниям ВКЛЮЧЕНО и ОТКЛЮЧЕНО прерывателей П1 и П2.
Для придания необходимой формы выходным широтно-модулированным сигналам компараторов их пропускают через формирователи сигналов управления силовыми ключами ФС. Принципиальная схема и диаграммы входных, промежуточных и выходных сигналов ФС приведены на рис. 10. ФС содержит регистр из двух последовательно включенных D-триггеров, схему выделения несовпадающих состояний выходных сигналов Q1 и Q2 триггеров, выполненную на элементах И-НЕ типа КМ155ЛАЗ, и формирователь временных интервалов, выполненный на элементе типа КМ155ИЕ2 (счетчик). Выбором частоты входного синхронизирующего сигнала 200 кГц, объема счетчика и за счет обратной связи с его выхода 3 на вход S обеспечивается формирование интервала tn, следующего за фронтом сигнала с выхода компаратора и равного
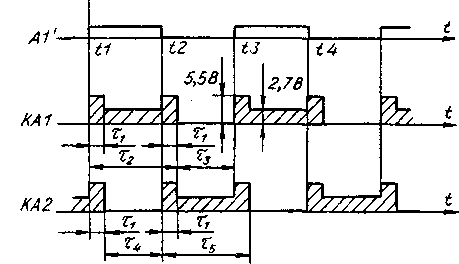
Рис. 9. Диаграммы сигналов регулятора тока:
τ1- пауза; τ 2 - отключенное состояние П2; τ3-включенное состояние П2; τ 4- включенное состояние П1; τ5 - отключенное состояние П1
по длительности паузе τ =22,5 мкс (см. рис. 9) и интервала τ1, в течение которого невозможно выключение того прерывателя, процесс включения которого начался в момент времени t2.
Схема ФС построена таким образом, что изменение логического уровня сигнала Al на D-входе первого триггера (на выходе компаратора) передавалось на его выход только в том случае, если сигнал на выходе 3 счетчика находится в состоянии лог. "1". На диаграмме рис. 10 показано, что в момент времени, когда изменилось состояние компаратора, за которым должен следовать процесс переключения прерывателей и это изменение было передано на выход первого триггера, логическое произведение Ql·Q2 становится не равным единице, поэтому снимается блокировка со входа S установки счетчика и в цепи начинается счет импульсов и формирование интервала tn, который заканчивается при возникновении положительного фронта в сигнале С2. Последующий интервал tвl будет сформирован независимо от того, сохранилось ли прежнее состояние сигнала А на входе D первого триггера или оно стало новым. Если в процессе формирования интервала tвl было изменение состояния сигнала А, то вновь будет сформирован интервал tn, а затем интервал tв2, длительность которого будет определена не процессами в счетчике, а состоянием сигнала А. Таким образом, при каждом изменении сигнала А1 происходит формирование соответствующего этому изменению состояния сигналов КА1 и КА2. При этом длительность цикла, ограничивающая мгновенную частоту переключения прерывателей, не может быть меньше 45 мкс, даже если внутри этого цикла произошло переключение компаратора (изменился уровень сигнала А1).
Схема контроля превышения тока (рис. 11)позволяет обнаружить такой режим работы регулятора тока, когда в нагрузке поддерживается среднее значение тока, превышающее установленное для прерывателя допустимое значение 25 А . Величина тока в нагрузке оценивается по величине компенсирующего тока во вторичных обмотках П трансформаторов Tl, T2 датчиков тока. Сигналы ТА (ТВ) в виде падения напряжения на измерительном резисторе R117 (R118) через выпрямитель на диоде V36 (V37) подаются на вход 4 компаратора 6F, на вход 3 которого задано делителем напряжения на резисторах R142, R141 и R140 напряжение уставки от источника 5 В, соответствующее току 34 А в блоке РПП1. Сигнал превышения тока СПТ формируется, если сигнал на входе 4 станет больше сигнала на входе 3 компаратора 6F. В контрольном режиме напряжение уставки может быть снижено в два раза по входу сигнала РК2 (резистор R138 соединяется с 0 В). Свечение индикатора V43 свидетельствует о том, что ток нагрузки превышал какое-то время допустимое значение.
В блоке РПП1 через схему блокировки управления, индикации и выбора режимов работы осуществляется управление различными элементами контуров регулирования тока и частоты вращения в рабочем, аварийном или контрольном режимах, функциональная схема приведена на рис. 12. В табл. 1 приведено информационное содержание состояний входных и выходных сигналов схемы.
В рабочем режиме схема реагирует только на изменение состояния сигнала ЗУИ, состояние других сигналов нейтрально. Сигналы AT и СПТ воздействуют непосредственно на формирователи сигналов КА1...КС2, а сигналы СПД и СПМ - через схемы в блоке диагностики и опорных сигналов ДОС2, которые реагируют на выходные сигналы ФБ и ПД, формируя по соответствующему алгоритму сигнал ЗУИ. Блокировка управления транзисторным инвертором заключается в том, что одновременно формируются уровни лог. "1" всех сигналов управления силовыми ключами КА1...КС2.
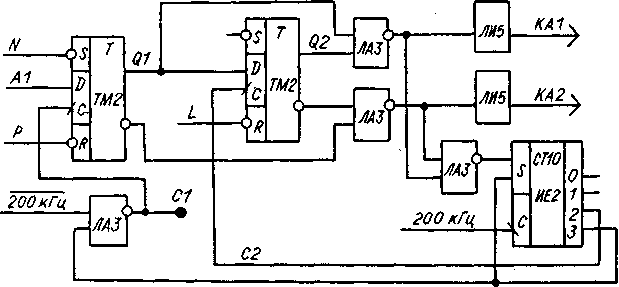
Рис. 10. Формирователь сигнала управления силовыми ключами
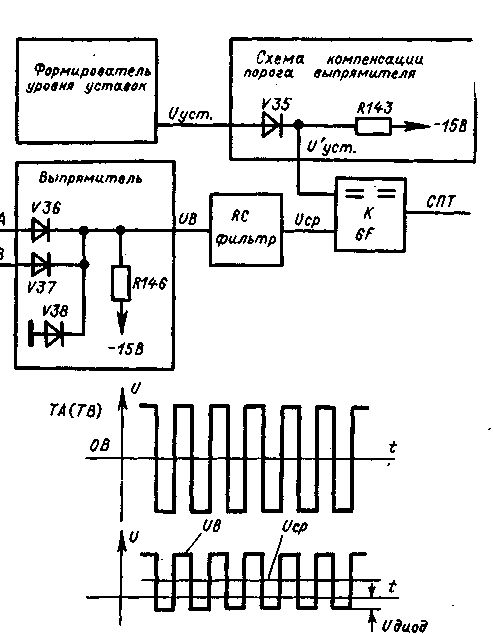
Таблица 1
|
Обозначение сигнала |
Информационное содержание состояний сигналов |
|
УстВП+СПДС Вход АТ Вход ЗУИ Вход СПТ СПД СПМ РСК+РК1 Вход РК2 Вход Uск Вход ПД Вход ПД* Выход P, N, L |
Объединенные по схеме ИЛИ сигнал Уст.ВП и сигнал сброса памяти диагностических сигналов СПДС. Сигнал выдается разрывом цепи минус 15 В при включении и перед выключением источника питания, а также при включении ОУП1 и при нажатой кнопке S1 в блоке ДОС2 Минус 15 В - отсутствие токовой перегрузки в цепях транзисторных инверторов и тиристорного инвертора; разрыв цепи - наличие токовой перегрузки Лог. "0" - привод функционирует, разрешена коммутация силовых ключей транзисторных инверторов; лог. "1" - запрещена коммутация силовых ключей транзисторных инверторов Лог. "0" - среднее значение фазного тока превышает 34 А в приводе подачи; лог. "1 ' - фазный ток менее 34 А в приводе подачи Лог. "1" - температура обмоток двигателя менее (150±23) °C; лог. "0" - температура обмотки двигателя более (150±23) °C Лог. "0" - более 0,6 с момент двигателя превышал 46 Н-м или неисправны блоки РПП1 , ИСП7, транзисторный инвертор, двигатель или механизм, лог. "1" - нормальное функционирование привода подачи Лог. "0" - режим, определяющий задание тестовой (контрольной) частоты 2 кГц на управление силовыми ключами и для режима контроля сигнатур; лог. "1" - рабочий режим функционирования регулятора тока Лог. "0" - снижение в два раза уставки контроля тока; отключение интегрального коэффициента усилителя регулятора частоты вращения; отключение сигнала задания тока возбуждения; лог. "1" - рабочий режим функционирования регулятора частоты вращения Импульсный сигнал, необходимый для проверки триггеров схемы управления Лог. "1" - сформирован сигнал перегрева двигателя привода лог. "0" - отсутствует перегрев двигателя лог. "0" - отсутствует перегрев двигателя Промежуточные сигналы управления состоянием триггеров в формирователе сигналов управления силовыми ключами (соотношение их логических уровней в различных режимах приведено в принципиальной схеме блоков РПП1) |
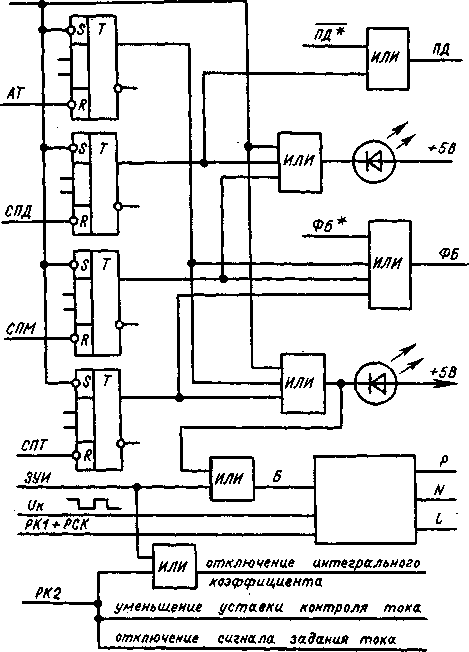
Рис. 12. Схема блокировки управления, индикации и выбора режимов работы
2.5. Контур регулирования частоты вращения
Контур регулирования частоты вращения обеспечивает соответствие между заданным значением частоты вращения (сигнал V) и ее фактическим значением (сигнал АС1). Сравнение сигналов V и АС1, формирование сигналов задания тока и э.д.с. осуществляется в приводе подачи усилителем регулятора частоты вращения УРЧВ и набором различных функциональных преобразователей, реализованным в блоке РПП1. Аналоговый сигнал частоты вращения АС1 и импульсный сигнал частоты вращения ωвр формируются в приводе подачи блоком измерителя скорости и перемещений ИСП7.
Структурная схема регулятора частоты вращения и функциональных преобразователей привода подачи приведена на рис. 13.
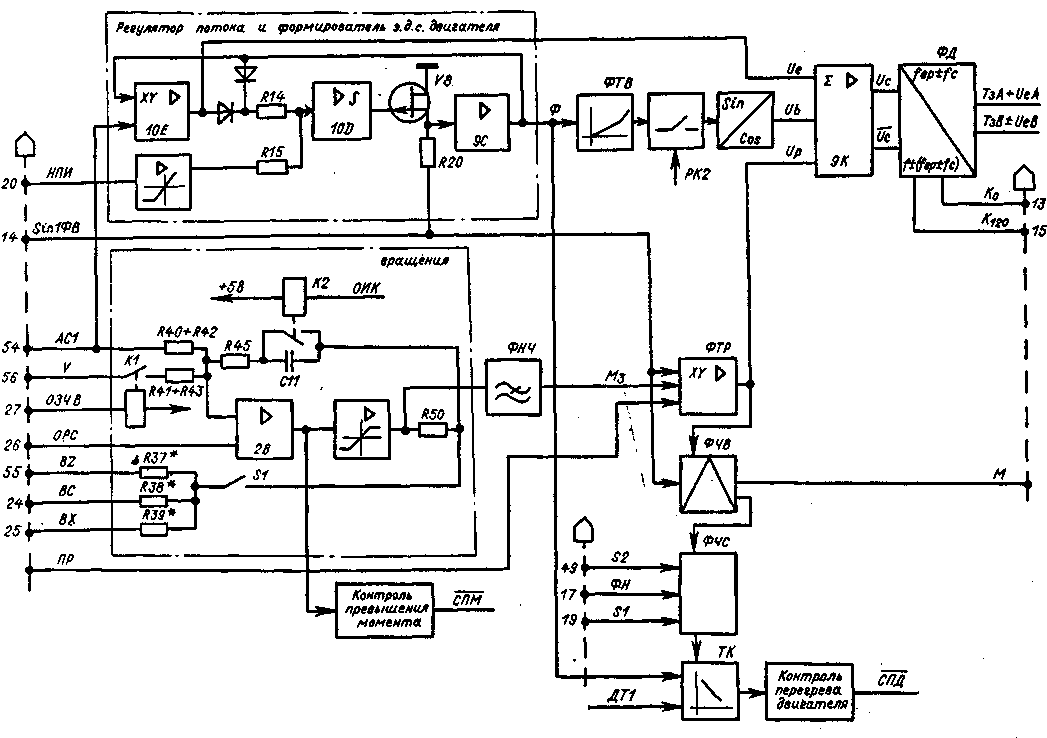
Рис. 13. Структурная схема регулятора частоты вращения
и функциональных преобразователей
В блоке РПП1 к ним относятся следующие функциональные группы:
1. усилитель регулятора частоты вращения УРЧВ (ПИ-регулятор);
2. фильтр низкой частоты ФНЧ и формирователь тока ротора ФТР;
3. регулятор потока и формирователь э.д.с. двигателя;
4. формирователь тока возбуждения ФTB;
5. фазочувствительный выпрямитель ФЧВ и формирователь частоты скольжения ФЧС;
6. температурный корректор ТК;
7. сумматор и фазовые детекторы (формирователи задания фазных токов и э.д.с.).
Сравнение сигналов V и АС1 по величине и полярности, выделение сигнала ошибки (разности) между ними осуществляется УРЧВ, выполненным по схеме ПИ-регулятора на основе операционного усилителя 2В с малым смещением нуля. Постоянная времени ПИ-регулятора выбрана такой, чтобы с учетом момента инерции нагрузки, приведенного к валу двигателя, отсутствовало перерегулирование при отработке возмущающих воздействий по нагрузке. Отрицательная обратная связь в усилителе 2В УРЧВ замыкается через схему ограничения напряжения (резисторы R47, R48, R49 и диоды V19...V22), операционный усилитель 2А, включенный по схеме повторителя с коэффициентом передачи, равным единице, и резистивный делитель напряжения на резисторах R50 и R37...R39. Величина выходного напряжения усилителя 2В, следовательно, и выходного сигнала УРЧВ ограничивается на уровне 5 В делителем напряжения на резисторах R47 и R49, если выходное напряжение положительной полярности, и делителем на резисторах R48 и R49 если отрицательной полярности. Одним из делителей напряжения, который образуется одной из пар резисторов R50 и R37, R50 и R38, R50 и R39 и тумблером S1, можно задать четыре значения пропорционального коэффициента передачи. Необходимость в различных значениях пропорционального коэффициента обусловлена тем, что в приводе могут быть применены различные типы двигателей, а также тем, что приведенные моменты инерции у механизмов координат X и Z разные. При установке блока в кассету соответствующий контакт разъема блока (25 или 55) подключается к цепи 0 В, сигнал обратной связи уменьшается, что равносильно увеличению коэффициента передачи, так как выходной сигнал УРЧВ снимается до делителя напряжения. При отключении тумблером S1 делителя напряжения коэффициент передачи имеет минимальное значение, которое необходимо установить при испытаниях привода отдельно от станка, когда двигатель имеет только собственный момент инерции, определяемый моментом инерции ротора. Пропорциональный коэффициент УРЧВ по входу сигнала V определяется отношением величины сопротивления резистора R45 к сумме величин сопротивлений резисторов R41 и R43, по входу сигнала АС1 -соответственно R45 к сумме (R40 + R42). Величины сопротивлений резисторов R40 и R41 выбираются в зависимости от соотношения между величиной напряжения, сигнала V и соответствующего ему значения частоты вращения. Значению 5 В сигнала АС1 соответствует частота вращения 2000 мин-1. При одинаковых значениях частоты вращения токи в цепях R40-R42 и R41-R43 должны быть равны.
Сигнал отключения задания частоты вращения ОЗЧВ. позволяет "разорвать" с помощью реле К1 цепь сигнала V в аварийных режимах или при необходимости отключить привод. Сигналом запрета управления инвертором ЗУИ с помощью реле К2 исключается интегральная составляющая в выходном сигнале УРЧВ путем шунтирования конденсатора С11. Таким образом, при отключенном приводе, но при включенном питании блока, в конденсаторе не происходит накопления заряда от входного тока усилителя 2В, смещений нуля в усилителе 2В и в сигнале АС1, поэтому не создаются возмущения типа "рывок" при включении приводов подачи.
Нулевые цепи источников сигналов заданной и фактической частот вращения и схем УРЧВ привода S и приводов подачи объединены (цепь ОРС) и подключены к шине 0 В в одной точке, что исключает влияние разности потенциалов в нулевых цепях блоков на входы УРЧВ блока РПП1 и повышает точность отработки заданных значений частоты вращения в нижней части диапазона.
Выходной сигнал УРЧВ подается в схему формирования тока ротора ФТР через активный фильтр низкой частоты с собственной частотой 100 Гц и относительным коэффициентом демпфирования 0,7. Фильтр устраняет влияние на устойчивость контура регулирования частоты вращения механических резонансов, возникающих в кинематической цепи привода подачи вследствие ограниченной жесткости вала двигателя и муфты сочленения вала двигателя с ходовым винтом. Частота механического резонанса примерно 300 Гц, а добротность резонансного контура находится в пределах от 20 до 40.
Контроль функционирования привода как регулятора частоты вращения осуществляется по длительности процесса ограничения выходного сигнала усилителя 2В в УРЧВ (уровень 13-15 В). Если развиваемый двигателем момент достаточен для поддержания заданного значения частоты вращения (блоки РПП1, ИСП7, транзисторный инвертор, двигатель и механизмы исправны), то среднее значение сигнала на выходе усилителя 2В не превышает 5 В. При перегрузке электропривода или неисправности одного или нескольких перечисленных устройств, выходной сигнал усилителя 2В скачком достигает уровня ограничения и при длительности этого состояния более 1 с схема контроля превышения момента формирует сигнал перегрузки СПМ. Схема содержит двухпороговый компаратор (рис.14) и формирователь задержки, выполненный с помощью интегрирующей RC-цепи (резисторы R53...R56, конденсатор С15). Сигнал СПМ поступает в схему блокировки управления, индикации и режимов работы (см. рис. 12).
Особенность
такой схемы
двухпорогового
компаратора
состоит в том,
что уровень
переключения
компаратора
задан не только
делителем
напряжения
на резисторах
R53 и R55 для входных
напряжений
положительной
полярности
и делителем
напряжения
на резисторах
R54 и R56 - для отрицательной
полярности,
но и падением
напряжения
на диоде примерно
равным 0,6-0,7 В.
Потенциалы
обоих входов
компаратора
зависят от
входного сигнала
до тех пор, пока
его уровень
не станет меньше
на 0,6-0,7 В величины
напряжения,
определяемой
отношением
 или
или
 ,
где
,
где
15 - напряжение источника питания,
R53...R56 - величины сопротивлений соответствующих резисторов.
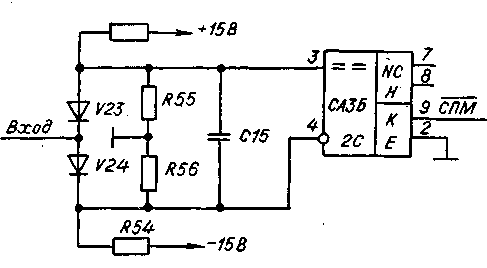
Рис. 14. Схема двухпорогового компаратора
При значениях входного напряжения, превышающих эту величину, потенциал одного из входов стабилизируется (например на входе 3), а второго - продолжает оставаться зависимым от входного напряжения. Переключение компаратора 2С произойдет, когда входное напряжение (положительной полярности) превысит на 0,6-0,7 В потенциал на первом входе. При входном напряжении отрицательной полярности стабилизируется потенциал на входе 4. До момента переключения компаратора 2.С потенциал на его инвертирующем входе 4 всегда отрицательнее, чем на неинвертирующем входе 3, поэтому выходной ключ разомкнут (переход К-Е выходного транзистора элемента К554САЗБ заперт).
Формирование заданного значения тока статора с требуемыми параметрами производится путем использования амплитудно-модулированных синусоидальных сигналов с частотой 2 кГц, которые обладают свойством, позволяющим осуществлять операции с векторными величинами (сложение, угловой поворот и т.п.) простыми приемами.
Модуль тока статора, равный корню квадратному из суммы квадратов тока возбуждения и тока ротора, получают суммированием модулированного выходного сигнала ФНЧ с несущей 2 кГц с модулированным сигналом тока возбуждения также с несущей 2 кГц, но отличающейся по фазе на 90 эл.градусов. Суммирование сигналов, эквивалентное суммированию векторов, производится сумматором, выполненным с помощью операционного усилителя 9К. Масштабные коэффициенты определяются отношением величины сопротивления резистора R68 к величине сопротивления резистора, через который подается входной сигнал. Кроме того, на вход: сумматора через резистор R67 подается модулированный синусоидальный сигнал, пропорциональный э.д.с. двигателя, совпадающий по фазе с несущей частотой сигнала тока ротора в двигательном режиме и противофазный ей в генераторном режиме работы двигателя. Сигнал, пропорциональный э.д.с. двигателя и поданные на вход регулятора тока, позволяет резко уменьшить ошибки, особенно при отработке тока возбуждения.
Таким образом, на выходе сумматора имеет место синусоидальный сигнал Tc+Ue с частотой 2 кГц и амплитудой, пропорциональной векторной сумме сформированных составляющих тока статора и э.д.с. двигателя.
Переход от синусоидального сигнала частоты 2 кГц к системе трехфазных сигналов частота которых равна алгебраической сумме частоты вращения 2fвр и частоты скольжения fc, а амплитуда определяется амплитудой синусоидального сигнала Tc+Ue, осуществляется с помощью фазовых детекторов. На входы фазового детектора ФД (рис. 15) подаются сигнал Tc+Ue, противофазный ему сигнал Тс+Uе, который получают с помощью инвертора 9L, и сигнал Ко (см. рис. 16), частота которого fo ± (2fвр ± fc), а скважность равна 2.
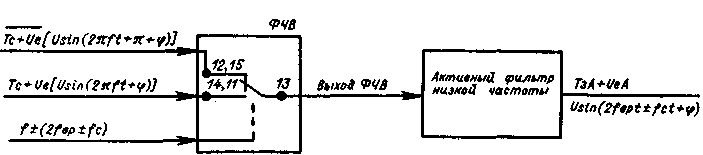
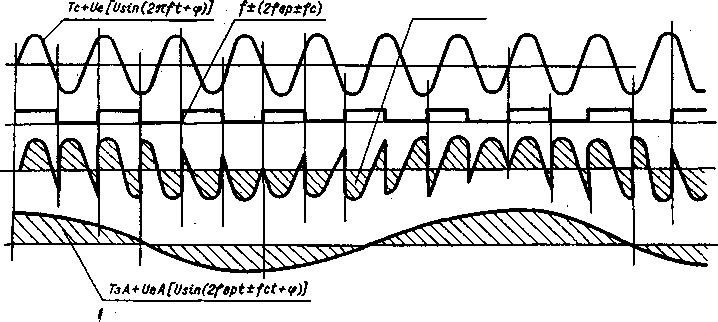
Рис. 15. Функциональная схема и диаграмма работы фазового детектора
ФД состоит из фазочувствительного выпрямителя ФЧВ и активного фильтра низкой частоты. Аналоговый коммутатор 10R (элемент типа К561КП1) на рис. 15 показан в виде переключающего контакта, управляемый сигналом К0, формирует из сигналов Tc+Ue и Tc+Ue напряжение сложной формы (см. рис. 15), постоянная составляющая которого меняется по синусоидальному закону с частотой 2fвр ± fc. Активный фильтр низкой частоты с собственной частотой 600 Гц и относительным коэффициентом затухания 0,7 подавляет несущую частоту 2 кГц и формирует на выходе синусоидальный сигнал ТзА + UeA с амплитудой, равной амплитуде сигнала Tc+Ue. Второй выходной сигнал ТзВ+UeB получают по аналогичной схеме. Так как управляющие сигналы К0 и K120 отличаются по фазе на 120°, то и выходные сигналы ТзА+UeA и ТзВ+UeB формируются сдвинутыми по фазе также на 120°. Для исключения зависимости управления состоянием аналогового ключа по входу А0 от сигнала на входе А1 каждый переключающий контакт реализован двумя каналами мультиплексора (элемент К561КП1), функциональная
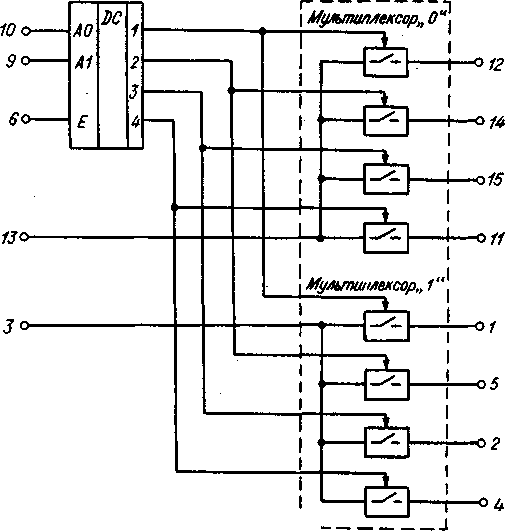
Рис. 16. Функциональная схема элемента типа К561КП1
схема которого приведена на рис. 16. Интегральная микросхема содержит два четырехканальных мультиплексора, которыми управляют через общие адресные входы А0, Al и вход стробирования Е. При подаче на входы А0 и Al двоичного кода, а на вход Е - уровень лог. "0", на одном из выходов дешифратора формируется управляющий сигнал, который поступает на соответствующую пару аналоговых ключей. Таким образом, в зависимости от входного кода два канала (по одному в каждом мультиплексоре) переходят в проводящее состояние. Направление коммутируемого тока значения не имеет. Для перевода всех каналов в непроводящее состояние необходимо подать на вход Е уровень лог. "1". Соответствие входного кода и коммутируемого канала приведено в табл. 2.
Сигналы задания тока возбуждения Uв и э.д.с. двигателя формируются схемой, содержащей три функциональные части: регулятор потока РП, формирователь э.д.с. двигателя ФЭД и формирователь тока возбуждения ФТВ.
Регулятор потока РП формирует сигналы задания потока Ф и Ф, амплитуда которых пропорциональна магнитному потоку в двигателе и сохраняется неизменной и равной номинальному значению в диапазоне частот вращения ротора двигателя от 0 до 1500 мин-1, если напряжение в сети переменного тока также равно номинальному значению 380 В или превышает это значение. Если напряжение сети меньше номинального значения, то в области частот вращения до 1500 мин-1 сигналы Ф и Ф также уменьшаются. При более высоких частотах вращения, величина заданного потока изменяется обратно пропорционально отношению заданного значения частоты вращения к значению граничной частоты вращения, при котором началось ослабление потока (уменьшение амплитуды сигналов Ф и Ф). Сигнал задания э.д.с. двигателя Ue формируется как произведение сигнала задания потока Ф и аналогового сигнала фактической частоты вращения АС1.
Таблица 2
|
Логическое состояние управляющих сигналов |
Номера выводов проводящего канала |
|||
|
А0 |
А1 |
Е |
Мультиплексор "0" |
Мультиплексор "1" |
|
0 0 1 1 X |
0 1 0 1 X |
0 0 0 0 1 |
13-12 13-14 13-15 13-11 - |
3-1 3-5 3-2 3-4 - |
X - произвольное состояние.
Регулятор потока РП содержит управляемый делитель напряжения (резистор R20 и полевой транзистор V8), выходной усилитель 9С, инвертор 10С и интегратор 10D. Сигнал Ф получают из сигнала sin 1ФВ путем модуляции его амплитуды сигналом разности между сигналом, задающим величину потока, зависимого от напряжения трехфазной сети, и сигналом Ф (выходным сигналом РП). Информация о величине напряжения сети содержится в сигнале "Напряжение питания инвертора" НПИ, который формируется в блоке питания ИП и имеет уровень 6,6 В при напряжении сети 380 В. Сигнал НПИ подается на один из входов интегратора 10D, на другой вход через диоды V4, V5 подаются сигналы Ф и Ф, интегратор 10D выделяет их разность в виде напряжения, которое воздействует на затвор полевого транзистора V8 и таким образом управляет величиной сопротивления канала сток-исток, что эквивалентно изменению коэффициента деления делителя напряжения, образованного резистором R20 и регулируемым Сопротивлением канала сток-исток полевого транзистора V8. Выходным усилителем 9С усиливается в 32,9 раза только переменная составляющая частоты 2 кГц. Таким образом, благодаря действию отрицательной обратной связи с выхода интегратора 10D на его второй вход через управляемый делитель напряжения, усилитель, инвертор 10С и диоды V4, V5 поддерживается соответствие между сигналами НПИ и Ф.
Это соответствие сохраняется в области значений частоты вращения (при напряжении сети 380 В граничная частота вращения 1500 мин-1), когда сигнал Ue, равный произведению сигналов Ф и АС!, становится больше сигнала Ф. При значениях частоты вращения, превышающих граничную частоту, схема РП переходит в режим поддержания постоянства величины сигнала Ue. Постоянство сигнала в области частот выше граничной частоты и при неизменном значении сигнала НПИ сохраняется благодаря тому, что в этом случае отрицательная обратная связь в интеграторе 10D замыкается через ФЭД (аналоговый умножитель 10Е, усилитель 10F, инвертор 9F) и диоды V2, V3, вместо прежней цепи через диоды V4, V5. Постоянство сигнала Ue будет только в том случае, если с увеличением сигнала АС1 пропорционально уменьшится сигнал Ф. Сигнал Ф будет уменьшаться до такой величины, пока не восстановится равенство среднего значения тока через резистор R14 и тока через резистор R15 интегратора 10D. Процесс выравнивания токов сопровождается уменьшением напряжения на затворе полевого транзистора V8 (выходе интегратора 10D) и, как следствие, уменьшением сигнала Ф. На рис. 17 показана зависимость между амплитудами сигналов Ф и Ue при различных значениях частот вращения и сигнала НПИ.
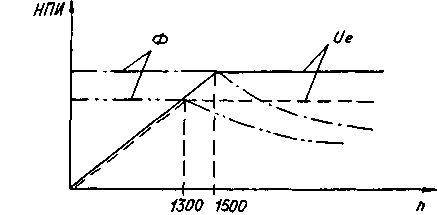
Рис. 17. Зависимость между амплитудами сигналов Ф и Ue
Перемножение сигналов Ф и АС1 выполняет четырехквадратный аналоговый перемножитель 10Е типа КР525ПС1 и усилитель 10F (на рис. 13 обозначен ХУ), который позволяет перемножать сигналы с любым сочетанием полярности. Амплитуда выходного сигнала усилителя 10F равна АС1*·Ф·КфЭд,
где АС1* - напряжение, пропорциональное сумме напряжения сигнала АС1 и
напряжения смещения на входе перемножителя 10Е;
Ф - амплитуда синусоидального сигнала задания потока;
- коэффициент передачи
перемножителя, у которого напряжение UR1 на резисторе R1 равно 29 В.
Особенность схемы ФЭД в том, что усилитель 10F управляется сигналом, существующим между выводами 14 и 2 перемножителя 10Е и имеет синфазное постоянное напряжение на входах 3 и 2 примерно 14 В. Синфазное напряжение на выход дифференциального усилителя 10F не передается. Если на выходе усилителя 10F существует постоянная составляющая, то она обусловлена произведением сигнала АС1 на напряжение смещения на входе перемножителя 10Е и собственным напряжением смещения нуля усилителя 10F. Эта постоянная составляющая в сигнале Ue исключается с помощью конденсатора С18, включенного на входе сумматора 9К.
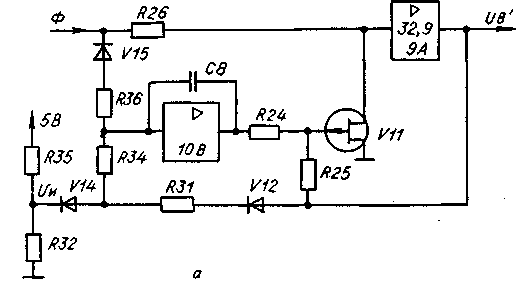
Непосредственное использование сигнала Ф в качестве сигнала задания тока возбуждения недопустимо из-за нелинейной зависимости между током возбуждения и магнитным потоком в асинхронном двигателе. Формирователь тока возбуждения ФТВ выполнен в виде усилителя переменного тока с изменяющимся от уровня входного сигнала коэффициентом передачи. На рис. 18 приведены функциональная схема ФТВ и его характеристика вход-выход (сигнал Ф - сигнал Uв). ФТВ содержит управляемый делитель напряжения (резистор R26 и полевой транзистор V11), выходной усилитель 9А с коэффициентом передачи примерно 32,9, источник напряжения Uи, определяющие излом идеализированной характеристики вход-выход (резистивный делитель напряжения R35 и R32, диод V14), интегратор 10В, включенный в цепь отрицательной обратной связи с выхода усилителя 9А на вход управляемого делителя напряжения (затвор полевого транзистора V11).
![]()
При уровнях
сигнала Ф до
значений Фгр
(см. рис. 18)
коэффициент
передачи ФТВ
определяется
отношением
где R31, R34, R36 - величины сопротивлений резисторов R31, R34, R36. Если уровень выходного сигнала достигает значения, при котором амплитуда выпрямленного сигнала в точке соединения резисторов R31 и R34 достигает такого значения, при котором диод V14 переходит в проводящее состояние, часть тока обратной связи проходит через диод VI4 и коэффициент передачи ФТВ возрастает. Возрастание коэффициента по мере увеличения входного сигнала происходит достаточно плавно, т.к. выпрямленный сигнал представляет собой однополярные полупериоды синусоид, а ответвление тока обратной связи через диод VI4 происходит на участках синусоид, где мгновенное значение напряжения превышает величину Uи+Uд (см. рис. 18); Uд - напряжение на диоде V14 (от 0,6 до 0,7 В). Среднее значение тока через диод VI4 возрастает не только за счет увеличения амплитуды, но и за счет увеличения длительности указанных участков, что обеспечивает плавное возрастание коэффициента передачи схемы ФТВ.
Интегратор 10В необходим для формирования из входного разностного сигнала постоянного напряжения для управления полевым транзистором V11.
В управляемом делителе напряжения с целью уменьшения нелинейных искажений синусоидального сигнала коэффициент ослабления входного сигнала имеет достаточно большое значение. С этой же целью на затвор полевого транзистора выходное напряжение ФТВ подается через резисторный делитель напряжения R25 R24 с коэффициентом передачи примерно 0,07. Необходимый уровень выходного сигнала восстанавливается с помощью усилителя 9А.
б
Рис. 18. Функциональная схема (а) и характеристика вход-выход ФТВ (б)
В схему ФТВ, реализованную в блоке РПП1, с целью повышения качества регулирования коэффициента передачи введен инвертор 9В выходного сигнала ив и используется сигнал Ф.
Выходной сигнал ив формирователя ФТВ подается через фазовращатель 8С, который вносит в него фазовый сдвиг 90 эл.. град, на частоте 2 кГц, на вход сумматора сигналов Up, Ue, UB. Сигнал Uв подается на вход фазо-вращателя через коммутатор 5В, который позволяет "разорвать" цепь сигнала 0в в контрольном режиме по сигналу РСК2 (лог. "0"). В рабочем состоянии блока (лог. "1" в сигнале РСК2) коммутатор 5В обеспечивает электрическое соединение выводов 11, 13, 15 элемента 5В.
Формирователь тока ротора ФТР содержит четырехквадратный аналоговый перемножитель 4А и усилитель 6А. Амплитуда выходного сигнала Up равна произведению sin 1ФВ·Мз*·Кфтр,
где sin 1ФВ - синусоидальный сигнал амплитудой 8,4 В;
Мз* - напряжение, равное сумме напряжений сигнала задания момента и напряжения смещения на входе у перемножителя 4А;
коэффициент передачи
перемножителя, у которого напряжение UR58 на резисторе R58 равно 29В.
Сигнал задания момента Мз на входы у перемножителя подается через коммутатор 4C , управляемый сигналом принудительного разгона ПР. Переключение сигнала Мз с инвертирующего входа на неинвертирующий приводит к изменению фазы сигнала Up на ¶ радиан, что эквивалентно изменению характера обратной связи по частоте вращения, т.е. переходу от отрицательной обратной связи к положительной. Сигнал ПР изменяет характер обратной связи только в цикле аварийного управляемого останова АУО , вращающегося электропривода по сигналу НН. Качественные соотношения в различные моменты времени между сигналами V, АС1, Мз , фазой сигнала Up, а также между сигналами НН , ОЗЧВ, ЗУИ, ПР в цикле АУО по сигналу НН приведены на диаграммах рис. 3.
Интервалы времени, при которых уровень сигнала АС1 уменьшается (привод тормозится) соответствуют отрицательной обратной связи в контуре регулирования частоты вращения, а интервалы времени с увеличивающимся уровнем сигнала АС1 (привод разгоняется) - положительной обратной связи.
При работе электропривода в приводах подачи могут возникать процессы, характерные для цикла АУО, если на частоте вращения, превышающей 1000 мин-1, происходит отмена команды ОУП1.
Ток возбуждения и ток ротора в двигателе регулируются независимо и развиваемый двигателем момент пропорционален сигналу Мз , если выдерживается необходимое соответствие тока ротора и частоты скольжения сигналу Мз. При формировании сигнала Up перемножитель 4А своим напряжением смещения на входе Y вносит погрешность в сигнал Мз, величина которого должна определять требуемый момент. Как следствие, амплитуда сигнала Up формируется с некоторой погрешностью. Для исключения расхождения необходимого соответствия между током ротора и частотой скольжения сигнал М, управляющий формирователем частоты скольжения ФЧС, формируется из сигнала Up в схеме фазочувствительного выпрямителя ФЧВ. Поступающий в ФЧВ сигнал Up детектирует с помощью сигнала sin 1ФВ, предварительно преобразованного компаратором 4В в прямоугольные импульсы. Формирование сигнала М поясняется функциональной схемой ФЧВ и диаграммами, приведенными на рис. 19. В схеме ФЧВ функцию контактной пары выполняет коммутатор 5В, цифрами на рис. 19 обозначены входы коммутатора 5В. Контактная пара и усилитель 6В с резисторами R85, R86 реализуют устройство умножения сигнала Up на "знак" (плюс или минус). Сигнал Ь с уровнем лог. "1" замыкает верхний ключ и размыкает нижний, а сигнал Ь с уровнем лог. "0" замыкает нижний ключ и размыкает верхний. В первом случае усилитель 6В включается по схеме повторителя, а во втором - инвертора. При этом на выходе усилителя 6В получают пульсирующее напряжение положительной или отрицательной полярности, которое используется в качестве сигнала М. Отметим, что фазы входного сигнала Up и сигнала Ь с выхода компаратора 4В могут либо совпадать, либо отличаться на ¶ радиан. На диаграммах (см. рис. 19) представлены оба случая: в первом случае, когда фазы сигналов совпадают, полярность получаемого сигнала М положительная. Во втором случае полярность сигнала М отрицательная. Сигнал М кроме управления ФЧС поступает через дополнительный резистор на микроамперметр PAl приборного щитка ЩП1 для индикации в процентах относительной величины момента нагрузки на двигатель. Отклонение стрелки прибора PAl до цифры 100 соответствует длительному моменту Mdo на нулевой частоте вращения.
Частота сигналов K0 и К120 определяется алгебраической суммой трех составляющих:
f - несущей частоты, значение которой постоянно и равно 2 кГц;
2fвр - составляющей, среднее значение частоты которой равно удвоенному значению частоты вращения в Гц;
fc - составляющей, среднее значение частоты которой равно частоте скольжения в Гц.
Частота fc определяется отношением сигнала М к сигналу U0, значение которого зависит от величины потока в двигателе (сигнал Ф) и температуры обмоток двигателя. Отношение M/U0 - преобразуется сначала в широтномодулированный сигнал ШМС, в котором отклонение отношения τ/T от значения 0,5 содержит информацию о величине частоты fc, где τ и T соответственно длительность импульса и период ШМС. Отклонение отношения τ/T от значения 0,5 выделяется в импульсно-фазовом преобразователе ИФП блока ИСП7 и преобразуется в нем в частоту fc. Работа ИФП будет пояснена после описания работы формирователя частоты скольжения ФЧС, функциональная схема которого приведена на рис. 20.
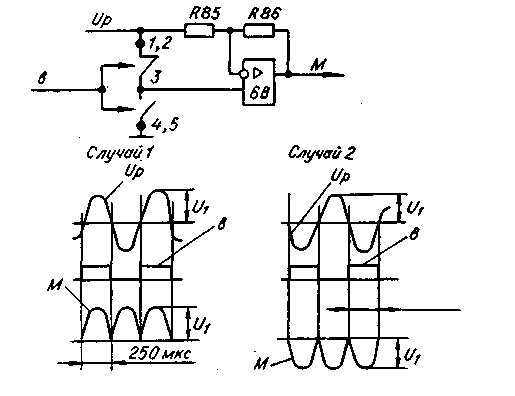
Рис. 19. Функциональная схема фазочувствительного выпрямителя
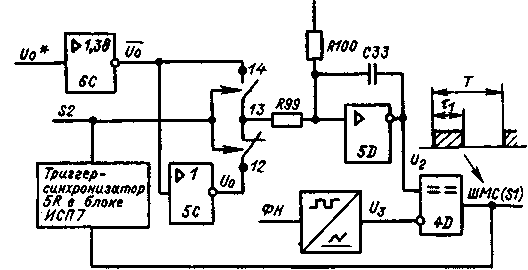
Рис. 20. Функциональная схема формирователя частоты скольжения
Сигналом S2 при переключении ключей формируется двухполярное напряжение U1 (см. рис.), амплитуда которого равна U0, а скважность зависит от скважности сигнала S2 (S1) . Среднее значение тока через резистор R99 также зависит от скважности сигнала S2 (S1). Интегратор 5D формирует выходное напряжение U2 такой величины, чтобы после модуляции его опорным сигналом из широтно-модулированный сигнал SI (S2) формировал среднее значение тока через резистор R99, равное току через резистор R100 от сигнала М (потенциал входа интегратора 5D равен 0 В). Таким образом достигается однозначное соответствие между величиной сигнала М и скважностью ШМС S1. Аналогичное однозначное соответствие существует между сигналом U0 и скважностью ШМС S1. Сигнал S2 получают из сигнала S1 с помощью триггера-синхронизатора, управляемого стробом С4 с периодом повторения 25 мкс. Синхронизация сигнала S1 необходима для согласования работы ФЧС и ИФП.
Широтно-импульсная модуляция выполняется на частоте выходного сигнала фаэовращателя (датчика положения), установленного на валу двигателя, равной f±fвp. При фиксированной частоте ШИМ могут возникнуть комбинационные частоты в сигнале fс, которые снижают качество регулирования момента. Опорное напряжение получают из сигнала непрерывной фазы ФН с помощью интегрирующей RC-цепи (резистор R101, конденсатор С32). Сигнал ФН формируется в блоке ИСП7 из выходного сигнала фазовращателя.
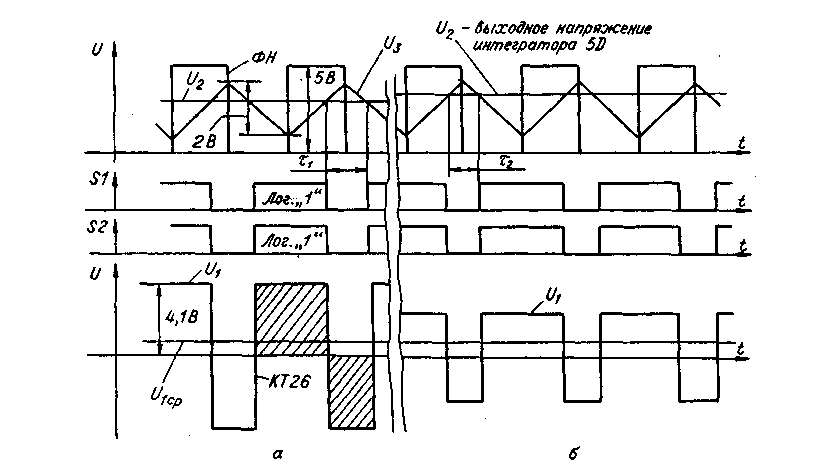
Рис. 21. Диаграммы сигналов формирователя частоты скольжения: а - холодный двигатель; б - горячий двигатель
На диаграммах рис. 21 приведены сигналы в различных точках схемы ФЧС для двух состояний двигателя: холодного и при температуре близкой к предельному значению перегрева 100 °С. При постоянном значении сигнала М несмотря на изменение температуры за счет изменения скважности (длительность интервала 2 меньше длительности интервала 1 ) поддерживается неизменным среднее значение напряжения и U1ср следовательно, токи через резисторы R99 и R100 друг друга компенсируют. Выходной сигнал интегратора увеличивается при повышении температуры двигателя, скважность сигнала SI (S2) также увеличивается, следовательно, возрастает и частота скольжения.
Импульсно-фазовый преобразователь ИФП представляет собой реверсивный счетчик объемом. 2000 бит, на вход "С+1" которого постоянно подается строб С1 частотой 4 МГц, а на вход "С-1" или вход "С+1" - некоторое количество дополнительных импульсов строба С4 частотой 40 кГц. Сигналом S2 регулируется среднее количество дополнительных импульсов, суммируемых в интервале Т-1 (см. рис. 20) и вычитаемых в интервале 1 с импульсами основной частоты 4 МГц. Поэтому частота на выходе счетчика будет равна 2 кГц+fc = ffc. При 1=0,5 Т количество импульсов, поданных на вход "С+1" и "С-1" будут равны, поэтому частота fc будет равна нулю. Частота выходного сигнала счетчика будет увеличиваться, если время подачи импульсов строба С4 на вход "С+1" будет больше времени подачи этих же импульсов на вход "С-1". Частота уменьшится, если соотношение интервалов времени будет обратным.
Частота скольжения fc при номинальном моменте от 1 до 2 Гц И пропорционально увеличивается при возрастании момента или при уменьшении потока двигателя, кроме того, изменяется с изменением температуры ротора двигателя в соответствии с выражением:
Вход для напряжения U0 ФЧС используется как вход делителя для коррекции fc в функции температуры, а также в функции от величины потока в области значений частоты вращения, когда происходит регулирование потока Ф. Напряжение величиной 0,7U0 = Ф* [l- (t – t0 )] , где Ф* - среднее значение выпрямленного напряжения сигнала Ф, формируется в схеме температурного корректора ТК (рис. 22).
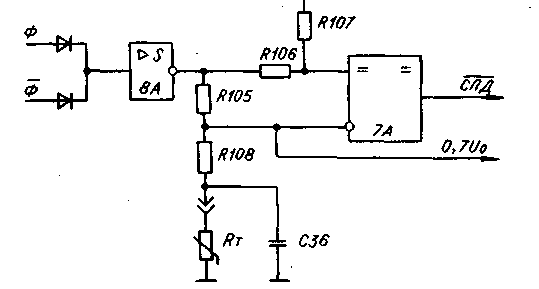
Рис. 22. Схема температурного корректора
В качестве датчика температуры используется термосопротивление RT, которое размещено в лобовых частях статорной обмотки асинхронного двигателя и имеет нелинейную зависимость величины сопротивления от температуры. Величина сопротивления RT при температуре 20 °С (820-1300) Ом, а при увеличении температуры уменьшается по экспоненциальному закону. Выбором величин сопротивления резисторов R106 и R109 при данных параметрах терморезистора RT выходное напряжение делителя напряжения, образованного резистором R106 и эквивалентным сопротивлением последовательно соединенных резисторов R109 и RT, линейно уменьшается с ростом температуры. Питание делителя осуществляется от интегратора 8А, который выделяет среднее значение выпрямленного напряжения сигналов Ф и Ф. Максимальное значение произведения (t-t0) равно 0,4, поэтому с достаточной точностью справедливо равенство
Точность косвенной оценки температуры ротора по температуре обмоток статора практически достаточна для компенсации снижения момента из-за увеличения сопротивления короткозамкнутой обмотки ротора при увеличении температуры.
В схеме ТК формируется сигнал превышения температуры двигателя СПД (лог. "0"), если падение напряжения на термосопротивлении становится меньше напряжения на резисторе R108. Сигнал СПД формируется, если температура обмотки достигает (150-23) °С и поступает в схему блокировки управления, индикации и выбора режимов работы (см. рис. 12).
2.6. Блок измерителя скорости и перемещения ИСП7
Блок ИСП7 предназначен для преобразования величины приращения фазы выходного напряжения фазовращателя относительно опорного (питающего) напряжения в сигналы углового перемещения и частоты вращения вала двигателя.
Входной сигнал - синусоидальное напряжение частотой 2 кГц2 f вр, где
fвр - частота вращения вала двигателя (ротора фазовращателя). Амплитуда сигнала зависит от экземпляра фазовращателя и его установки в асинхронном двигателе и может принимать одно из значений в диапазоне от 5 до 20 В. Сдвиг фазы выходного напряжения фазовращателя относительно питающего его напряжения частотой 2 кГц, принимаемого за опорное, пропорционально зависит от положения ротора фазовращателя (положения вала двигателя). При непрерывном вращении вала двигателя в одну сторону указанный сдвиг фазы периодически изменяется от 0 до 360 эл. град, дважды за оборот вала двигателя.
Выходные сигналы перемещения:
1. две серии импульсных сигналов перемещений sin, cos. Взаимное положение импульсов серий определяется направлением перемещения, а количество изменений (фронтов) сигналов определяется величиной перемещения;
2. количество периодов импульсных сигналов sin, cos, соответствующее одному обороту вала двигателя, равно 2500;
3. сигнал нуль-метки НМ выдается два раза за оборот вала двигателя и имеет фиксированный фазовый сдвиг относительно питающих напряжений ФВ. Сигнал НМ формируется в интервале равном 1/200 оборота вала двигателя. Максимальная частота вращения, на которой формируются все сигналы НМ, равна примерно пяти оборотам в секунду; минимальная длительность сигнала НМ - 500 мкс;
4. сигналы sin, cos и нуль-метка НМ выдаются каждый в прямом и инверсном виде. Уровни сигналов и характеристика нагрузки определяются исполнением блока и приведены в табл. 3.
В блоке формируются в масштабе 2,5 мВ·мин аналоговый сигнал фактического значения частоты вращения АС и сигналы КО, К120 управления фазовыми детекторами, которые используются в контуре регулирования частоты вращения (блок РПП1).
Таблица 3
|
Шифр исполнения блока |
Уровень сигнала, В |
Характеристика нагрузки |
|
|
лог. "1" |
лог. "0" |
||
|
ИСП7-1
ИСП7-2 |
от 9 до 13 от 3 до 5 |
от 0 до 1,5 от 0 до 0,5 |
Сопротивление не менее 820 Ом
Ток не более 10 мА |
В блоке для управления формирователем частоты скольжения ФЧС (блок РПП1) из сигнала S1 формируется сигнал S2 и из сигнала ФВ1 - сигнал ФНК с симметричными полупериодами.
Для контроля функционирования блока ИСП7 на контакты разъема выведены:
1. импульсный сигнал частоты вращения ротора ωвр - 4000 импульсов за один оборот вала двигателя;
2. сигнал отрицательного направления движения фазы выходного сигнала фазовращателя ОНД.
Из блока диагностики и опорных сигналов ДОС2 в блок ИСП7 поступает группа сигналов стробов С1-С5. Сведения о частоте, форме и распределении во времени сигналов стробов С1-С5 приведены на диаграммах в принципиальной схеме блока ИСП7.
Фазовый сдвиг выходного сигнала ФВ относительно питающего напряжения пропорционален углу поворота ротора ФВ относительно исходного положения, при котором эти фазы совпадали. Приращение фазы выходного сигнала ФВ за период изменения выходного сигнала пропорционально приращению угла поворота за это же время. Способ формирования сигналов перемещения в блоке ИСП7 заключается в выделении приращения фазы выходного сигнала ФВ за каждый период его повторения и в последующем преобразовании полученного кода в количество импульсов и аналоговый сигнал фактического значения частоты вращения.
На рис. 23 показано изменение фазы и периода выходного сигнала ФВ при вращении его ротора.
Текущий (накопленный) фазовый сдвиг представляет собой сумму приращений фазы ∆φ в данном и предыдущих периодах повторения выходного сигнала. Например, для второго периода ТВ2 текущая фаза:

где ΔT1, ΔT2 - приращения временного сдвига, равные разности между периодом питающего напряжения и периодами ТВ1 , ТВ2 выходного сигнала ФВ;
Тп - период повторения напряжения питания ФВ.
Текущему фазовому сдвигу φi который измеряется один раз за период в указанные моменты времени, соответствует временной сдвиг Ti. Фазовый сдвиг, пропорциональный углу поворота ротора ФВ, в свою очередь, пропорционален перемещению механизма станка, то есть временной сдвиг Ti в определенном масштабе равен величине перемещения механизма.
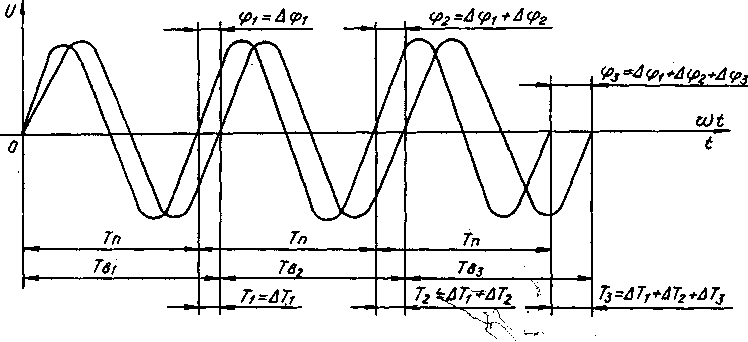
Рис. 23 . Диаграмма изменения фазы и периода выходного вращения ротора
Из рис. 23 видно, что, например, временной сдвиг Т2 для второго периода равен:
![]()
Временной сдвиг Т2 состоит из приращений временного сдвига за первый и второй периоды выходного сигнала, каждое приращение равно разности между периодами выходного сигнала ФВ и питающего напряжения. Таким образом, полное приращение временного сдвига Ti (фазу), следовательно, перемещение можно получить, если измерить каждое приращение ДТ1, а затем все их просуммировать.
На рис. 23 показан случай Тв>Тп, что соответствует изменению фазы выходного сигнала в сторону отставания, т.е. одному направлению движения. При другом направлении движения фаза меняется в сторону опережения, при этом Тв<Тп.
При отсутствии движения Тв=Тп, а дТi=0. Из рис. 23 видно, что при движении Тв≠Тп, то есть в общем случае мгновенная частота выходного сигнала fвi=1/Твi не равна частоте питания ФВ. Величина приращения фазы (перемещения) ∆φi за период повторения выходного сигнала ФВ с некоторой погрешностью характеризует скорость перемещения.
Приращение ∆Тi временного сдвига i-го периода относительно предыдущего (i-1) периода можно определить, если ввести опорный сигнал Фоп, период которого равен периоду выходного сигнала фазовращателя в предыдущем (i-1) периоде, а фаза совпадает с фазой сигнала ФВ также в (i-1) периоде.
Преобразование приращение перемещения за период выходного сигнала фазовращателя в аналоговый сигнал фактического значения частоты вращения АС выполняется в следующей последовательности:
выделяют в виде временного интервала tИ смещение по фазе выходного
сигнала фазовращателя относительно сигнала Фоп;
в полученном временном интервале tИ выделяют две составляющие: первую составляющую – интервал дискретного времени tД, кратную целому числу периодов опорной частоты (импульс строба С1) и вторую составляющую – интервал точного времени tT, равную разности tИ- tД;
преобразует интервал дискретного времени tД в цифровой эквивалент;
запоминают цифровой эквивалент интервала времени tД;
преобразуют цифровой эквивалент интервала времени tД в интервал tДτ задержанный относительно tД на целое число периодов опорной частоты (на время большее, чем tД );
составляющие tT и tДτ в разные моменты времени преобразуют в напряжение;
напряжение, пропорциональное интервалу времени tT, вводят в промежуточный аналоговый элемент памяти;
формируют алгебраическую сумму напряжений, пропорциональных интервалу времени tT в двух, следующих друг за другом периодах ФВ;
преобразуют цифровой эквивалент интервала дискретного времени tДτ в напряжение, которое в зависимости от направления вращения вала двигателя суммируют со знаком плюс или минус с полученной ранее алгебраической суммой напряжений и таким образом формируют результирующее напряжение, пропорциональное частоте вращения;
запоминают результирующее напряжение на время, равное периоду сигнала ФВ, которое используется в качестве сигнала АС;
на вход реверсивного счетчика, формирующего сигнал опорной фазы Фoп, подают число импульсов, равное числу периодов строба С1 в интервале времени tДτ и таким образом к следующему измерению задают новое начало отсчета, которое с точностью до периода строба С1 совпадает с фазой выходного сигнала фаэовращателя в момент измерения;
последовательно с частотой выходного сигнала фазовращателя повторяют перечисленные выше операции.
Структурная схема блока ИСП7 приведена на рис. 24. Синусоидальный сигнал ФВ1 с выхода фазовращателя поступает на вход нуль-органа, в котором формируются импульсы прямоугольной формы ФНК. Фронты сигнала ФНК на выходе компаратора 1 В совпадают с моментами перехода синусоиды через 0 В (рис. 25). Из-за помех в сигнале ФВ1 и высокой чувствительности компаратора на фронтах сигнала ФНК может быть несколько коротких импульсов, которые не оказывают влияния на функционирование схем в блоках РПП1,
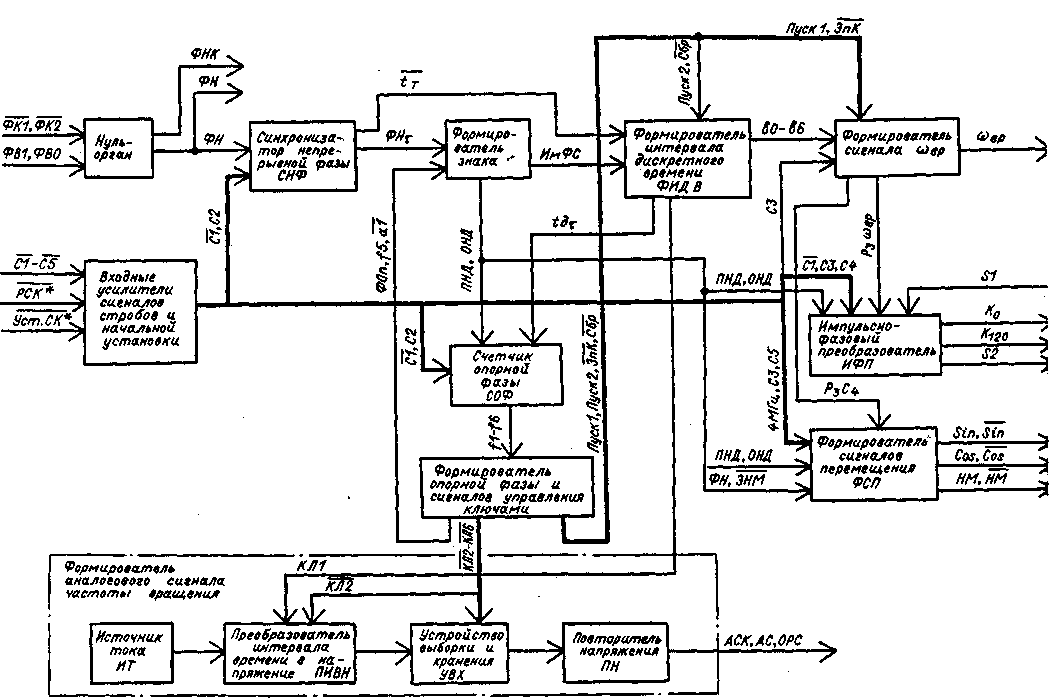
Рис. 24. Структурная схема блока ИСП7 "Сигналы УстСК, РСК используются во всех функциональных группах.
но не могут быть использованы для управления функциональными частями блока ИСП7. Для исключения влияния помех используется дополнительный компаратор 1А, на инвертирующий вход 4 которого задано напряжение смещения Uсм отрицательной полярности, и RS-триггер 2A, который управляется выходными сигналами компараторов 1А и 1В. Фронты выходного сигнала триггера 2А (сигнал ФН) всегда совпадают с отрицательными фронтами выходных сигналов компараторов 1А и 1В (см. рис. 25).
Синхронизатором непрерывной фазы СНФ формируется сигнал интервала точного времени tT, который содержит информацию о величине фазового сдвига между сигналами ФН и Фоп не кратной периоду строба Cl (C2). Для выделения сигнала tT сигнал ФН синхронизируется сигналом Сl. Формируется сигнал ФНτ, из которого после дополнительной синхронизации сигналом С2 формируется сигнал ФНτ1 (рис.26). Сигнал tT выделяется как интервал между положительными фронтами ФН и ФН τ1. В сигнале tT можно выделить два интервалам один переменный, равный интервалу между положительными фронтами сигналов ФН и ФНτ, и другой постоянный, длительностью 62,5 нс, равный интервалу между положительными фронтами сигналов ФН τ1 и ФНτ. Сигнал интервала дискретного времени tД выделяется между положительными фронтами синхронизированных сигналов ФНτ и Фоп в формирователе знака с помощью фазового детектора, который выполнен на элементе "ИСКЛЮЧАЮЩЕЕ ИЛИ" типа КМ155ЛП5 и элементе 4И-НЕ. Элемент КМ155ЛП5 выделяет моменты времени, когда логическое произведение сигналов Фоп·ФНτ или Фоп·ФНτ равно 1. На элементе 4И-НЕ /ЗЕ/ выделяются только моменты времени между положительными фронтами сигналов Фоп и ФНτ. Это происходит по сигналу разрешения формирования фазового сдвига Рз, диаграмма которого приведена на рис. 27.
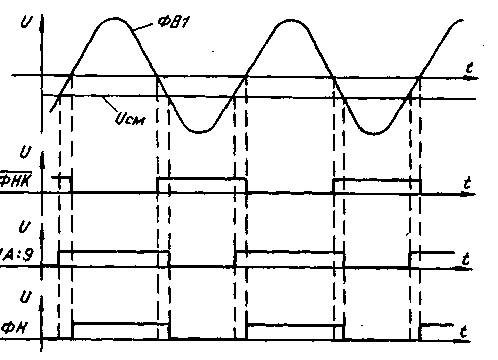
Рис. 25. Диаграммы входных и выходных сигналов нуль-органа
Рис. 26. Диаграмма формирования сигналов точного tT и дискретного tд времени
Рис. 27. Диаграмма формирования управляющих сигналов
Сигнал разрешения формируется из частот счетчика опорной фазы и расположен симметрично относительно положительного фронта Фоп.
Длительность сигнала Рз 100 мкс, что позволяет перекрывать все возможные смещения фазового сдвига сигналов ФНτ и следящего за ним Фоп (при максимальной частоте вращения вала двигателя 2000 об/мин фазовый сдвиг не превышает 17,5 мкс).
Отдельного формирователя сигнала разрешения в схеме нет, его составляющие f5 (выходная частота счетчика опорной фазы) и al (выход сдвигового регистра) объединены по схеме И на том же элементе ЗЕ.
Выделенный интервал времени заполняется сигналом строба С2 и таким образом формируется сигнал ИмФС, который является эквивалентом интервала tД. Сигнал ИмФС используется для получения сигналов направления движения ОНД и ПНД, а также в формирователе интервала дискретного времени. Информация о величине перемещения и знаке содержится между положительными фронтами сигналов Фоп и ФНτ. Если положительный фронт Фоп опережает фронт ФНτ, имеет место положительное движение фазы ПНД; при отставании фронта Фоп от фронта ФНτ -отрицательное движение фазы - ОНД. Следовательно, первый положительный фронт импульсного сигнала фазового сдвига ИмФС во времени будет совпадать с уровнем лог. "1" или лог. "0" в сигнале Фоп. По этому признаку с помощью первого триггера 2Т формируются сигналы ПНД и ОНД. Второй триггер 2Т используется для смещения на 50 мкс фронта сигналов ПНД, ОНД относительно момента записи информации в первый триггер 2Т при смене направления движения. Эта задержка необходима для окончания выдачи всех импульсных сигналов перемещения sin, cos вычисленных в периоде, предшествующем смене направления движения.
Формирователь интервала дискретного времени ФИДВ предназначен для преобразования число-импульсного кода перемещения, содержащегося в сигнале ИмФС, в параллельный код перемещения (цифровой эквивалент интервала времени tД), необходимый для формирования сигнала ωвр и импульсных сигналов перемещения sin, cos.
После окончания счета импульсов строба С2, содержащихся в сигнале ИмФС в счетчике, выполненном на элементах КМ155ИЕ7, остается код перемещения ротора фазовращателя за период его выходной частоты.
В определенный момент времени этот код сигналом записи кода ЗпК переписывается в реверсивный счетчик формирователя сигнала ωвр, а затем по сигналу ПУСК2 начинается Формирование сигнала tДτ. Счетчики 4С и 4В ФИДВ сигналом ПУСК2 переводятся в режим вычитания импульсов строба С1, который продолжается до возникновения сигнала "заема" на выходе BR элемента 4В: следует "сброс" триггера 5S и блокировка импульсов строба С1 на входе "С-1" счетчика. Периоды стробов С1 и С2 равны, поэтому равны и длительности интервалов, заданных сигналами ИмФС и tДτ (см. рис. 26). После окончания режима вычитания счетчики 4В и 4С остаются в состоянии FF. Обнуление счетчиков производится сигналом сброса Сбр, временная диаграмма которого аналогична диаграмме сигнала управления ключом КЛ2, приведенной на рис. 28. Счетчик опорной фазы СОФ выполнен на микросхемах 4L, 4К, 4F и служит для формирования сигнала Фоп, а также сигналов управления ключами.
В случае, если временной интервал tД между положительными фронтами Фоп и ФНτ больше 50 мкс, что может иметь место при включении питания, формируется сигнал записи начального положения ЗпНП, по которому производится предустановка элементов, формирующих Фоп.
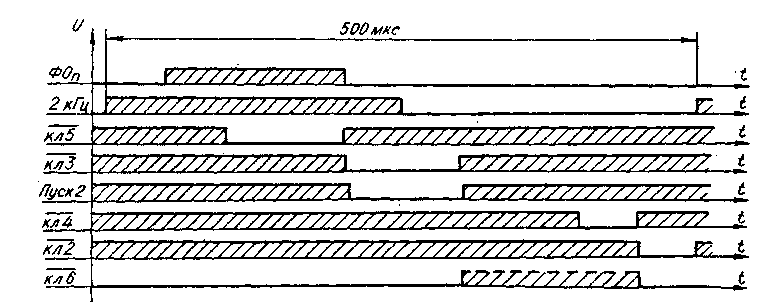
Рис. 28. Диаграмма работы ключей
Примечание. Сигнал КЛ6 уровня логической "1" появляется только при наличии сигналов ОНД и tДτ
В результате фронт сигнала Фоп сдвигается в сторону уменьшения интервала tД. Длительность сигнала ЗпНП равна длительности tT.
Сигнал Фоп формируется с помощью реверсивного счетчика опорной фазы СОФ и части элементов (триггеры 5F, 5К) формирователя опорной фазы и сигналов управления ключами, которые управляются выходными сигналами f1-f6 счетчика опорной фазы. Подстройка фазы сигнала Фоп под фазу выходного сигнала фазовращателя в (i –1)-м периоде достигается тем, что дополнительно к импульсам строба С1, поданным на вход "С+1" СОФ, на вход "С+1" при отрицательном направлении движения (ОНД) фазы выходного сигнала фазовращателя и на вход "С-1" - при положительном направлении движения (ПНД) подаются импульсы строба С2 по разрешению сигнала tДτ. При этом количество импульсов строба С2, поступившее в СОФ, равно их количеству в сигнале КмФС, следовательно, фаза сигнала Фоп в счетчике опорной фазы к следующему моменту определения величины перемещения будет скорректирована на необходимую величину. Формирователь опорной фазы и сигналов управления ключами использует выходные сигналы счетчика опорной фазы и дополнительно к указанным выше формирует из них следующие сигналы (рис. 27 и рис. 28):
1. ЗпК - запись кода. Импульс длительностью 25 мкс, переписывающий код со счетчика дискретного времени в формирователь сигнала ωвр. Начало этого импульса смещено на 50 мкс от фронта опорной фазы;
2. ПУСК2 - сигнал разрешения счета на вычитание в ФИДВ. Длительность его 100 мкс, начало через 250 мкс от фронта Фоп;
3. ПУСК1 - сигнал, разрешающий счет на вычитание в формирователе сигнала ωвр. Начало этого сигнала совпадает с фронтом ЗпК, что дает возможность выдавать сигналы перемещения в течение всего периода выходного сигнала ФВ за исключением 25 мкс (длительность ЗпК);
4. сигналы КЛ2-КЛ6 необходимы для управления ключами в формирователе аналогового сигнала фактического значения частоты вращения (ФАСЧВ).
Приращение перемещения (приращение разности фаз) за период выходного сигнала фазовращателя, которое соответствует длительности сигнала tДτ, является эквивалентом частоты вращения. Составляющая приращения, которая соответствует длительности сигнала tT, является эквивалентом пути, поэтому для перехода к частоте вращения необходимо вычислить разность двух значений tT в соседних периодах. Сигнал, характеризующий значение частоты вращения, АС вычисляется как алгебраическая сумма трех составляющих: напряжения, пропорционального интервалу tДτ , напряжения, пропорционального интервалу tT в (i-1) периоде, и напряжения, пропорционального интервалу tT в данном, i-ом периоде.
Формирователь аналогового сигнала фактического значения частоты вращения ФАСЧВ предназначен для преобразования в напряжение величины сдвига фаз между выходным сигналом Фоп счетчика опорной фазы и выходным сигналом нуль-органа ФНτ и включает в себя источник тока ИТ, преобразователь интервала времени в напряжение ПИВН, устройство выборки и хранения УВХ и повторитель напряжения ПН. Функциональная схема ФАСЧВ приведена на рис. 29, а временные диаграммы его работы для случаев положительного и отрицательного направления вращения вала двигателя приведены соответственно на рис. 30 и рис. 31.
За положительное направление вращения вала двигателя (ротора фазовращателя) условно принято такое направление вращения, когда сигнал ФВ отстает по фазе от сигнала Фоп. Этому направлению вращения соответствует положительное значение сигнала АС.
На временных диаграммах (рис. 30, рис. 31) для пояснения принципа работы увеличены (относительно фактических) интервалы времени включения
ключа 1. Источник тока выполнен по традиционной схеме и состоит из усилителя 6А опорного напряжения (в качестве опорного напряжения используется напряжение питания 5 В) и собственно источника тока (резисторы R44, R45, R46, микросхема 7В, транзисторы V17, V18). Выходной ток источника тока - 3 мА.
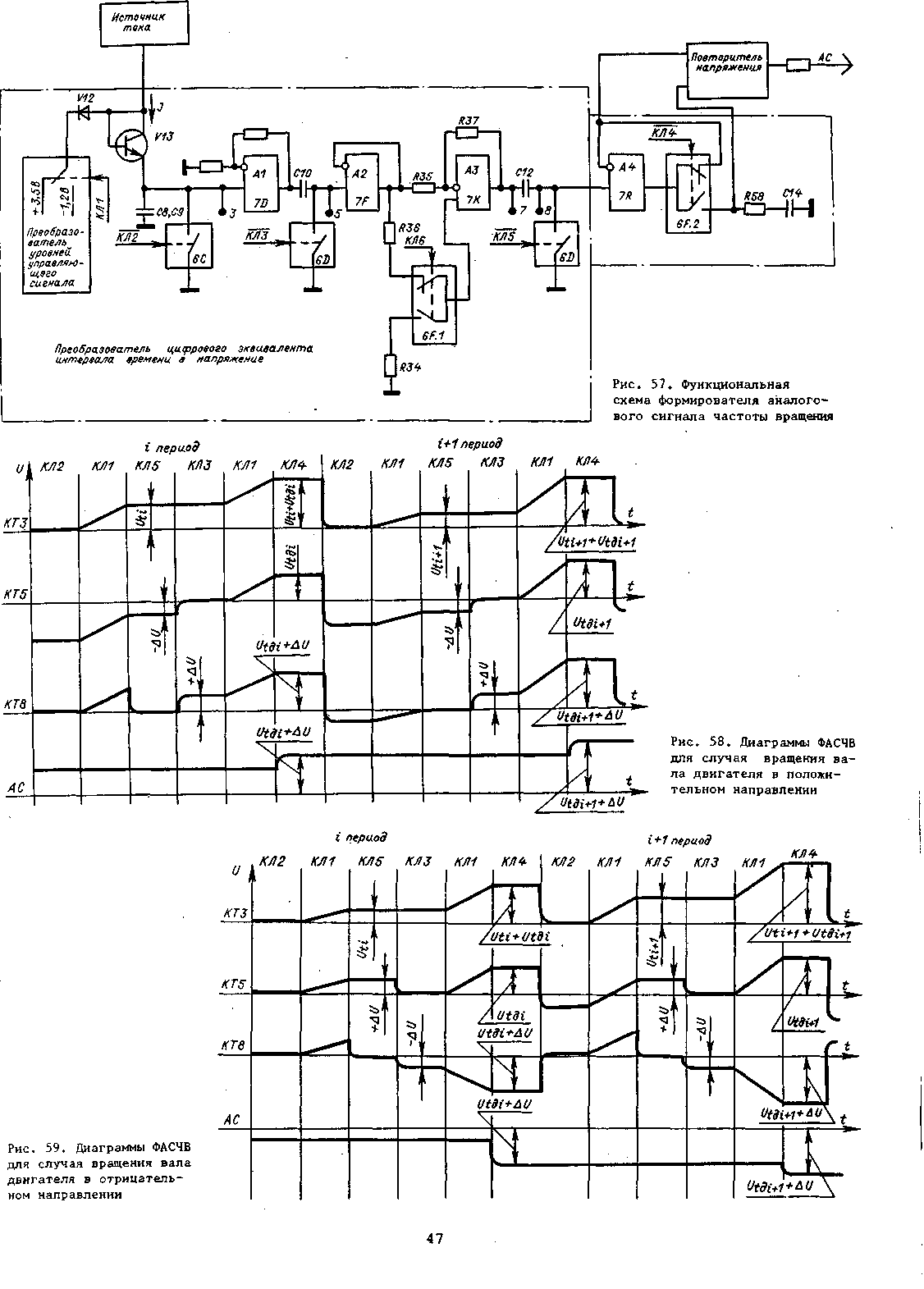
Преобразователь интервала времени в напряжение ПИВН включает в себя диодный ключ, состоящий из преобразователя уровней управляющего сигнала (транзистор V10, диод VII, резисторы R29, R30 и конденсатор С7) и коммутирующих ток диода VI 2 и транзистора VI 3 в диодном включении; накопительные конденсаторы С8, С9, CIO, C12, повторитель напряжения 7F и управляемый инвертор напряжения, состоящий из усилителя 7К, резисторов R34...R37 и аналогового ключа 6 (микросхема 6F.1).
Управляемый инвертор может работать либо в режиме повторителя напряжения (при указанном на функциональной схеме состоянии ключа 6), либо в режиме инвертора напряжения (при противоположном состоянии ключа 6).
Устройство выборки и хранения УВХ включает в себя усилитель 7R, ключ 4 (микросхема 6F.2) резисторы R58, R59 и емкость С14. Состояние ключа 4, показанное на функциональной схеме, обеспечивает режим хранения.
Повторитель напряжения имеет большое входное сопротивление (для того, чтобы не влиять на величину заряда емкости С14) и низкое выходное сопротивление. Выполнен в виде трехкаскадного повторителя (рис. 32) - первый каскад для увеличения входного сопротивления и уменьшения напряжения смещения выполнен на согласованной паре полевых транзисторов КР504НТЗВ (7S) , один из которых включен в режиме источника тока, а второй - в режиме ис-токового повторителя; последующие два каскада - эмиттерные повторители на транзисторах разного типа проводимости. Стабилитроны VI 9, V20 ограничивают напряжение на полевых транзисторах на безопасном уровне.
Рассмотрим работу ФАСЧВ для случая положительного направления вращения вала двигателя.
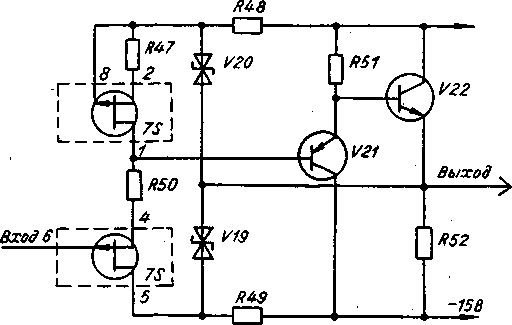
Рис. 32. Функциональная схема повторителя напряжения
В исходном состоянии емкости С8, С9 разряжены, ключ 2 выключен, а на емкости С10 хранится значение напряжения Uti-l пропорциональное длительности предыдущего импульса tTi-1.
В момент появления фронта сигнала ФВ формируется импульс tTi, который открывает ключ 1 на время длительности импульса tTi. При этом в течение указанного времени от источника тока положительной полярности начинают заряжаться емкости С8, С9. После закрывания ключа 1 на указанных емкостях (контрольная точка КТЗ) будет сохраняться напряжение Uti пропорциональное длительности импульса tTi. На входе повторителя напряжения (КТЗ) в этом случае будет разность напряжений ∆U=Uti-1– Uti. Указанная разность напряжений будет также на выходе управляемого инвертора (КТ7), который для случая положительного направления вращения вала двигателя включен в режиме повторителя напряжения.
Затем в соответствии с временной диаграммой (см. рис.28) включается ключ 5 (6D) и напряжение ∆U запоминается на емкости С12, После выключения ключа 5 напряжение ∆U будет храниться на емкости С12.
При включении ключа 3 в КТ8 устанавливается значение напряжения ∆U, противоположное по знаку напряжению в КТ5 (см. рис.30, 31), кроме того на емкости С10 запоминается напряжение Uti, пропорциональное длительности импульса tTi, а на входе управляемого инвертора - напряжение 0 В.
После выключения ключа 3 по сигналу ПУСК2 формируется импульс tДτ, который открывает ключ 1 на время импульса tДτ. После окончания импульса tДτ на емкостях С8, С9 (КТЗ будет сумма напряжений U=Uti+UtДi) а в КТЗ -алгебраическая сумма напряжений UAC = UtДi + ∆U. При включении ключа 4 напряжение UAC записывается в УВХ и передается на выход блока в качестве аналогового сигнала фактического значения частоты вращения АС.
При отрицательном направлении вращения вала двигателя работа ФАСЧВ аналогична, за исключением того, что в момент времени, соответствующий сигналу ПУСК2, управляемый инвертор переключается в режим инвертирования сигнала.
Сигналы К0 и К120, формируемые импульсно-фазовым преобразователем ИФП, имеют частоту повторения f±2fBp±fc. Формирование суммы частот f±fc в ИФП было пояснено при описании формирователя частоты скольжения в блоке РПП1. Составляющая сигнала ±2fBp формируется в ИФП из сигнала Рзωвр, длительность которого зависит от сигнала разрешения счета, а частота повторения в два раза меньше частоты импульса строба СЗ. В зависимости от знака направления движения сигнал Рзωвр разрешает прохождение импульса строба СЗ на вход "С+1" или "С-1" счетчика ИФП, корректируя соответствующим образом частоту выходных сигналов К0 и К120. За один оборот вала двигателя формируется 4000 импульсов сигнала ωвр.
Основной sin и смещенный cos импульсные сигналы перемещения, имеющие 2500 периодов за один оборот вала двигателя, формируются формирователем сигналов перемещения ФСП. Они являются эквивалентом сигналов фотоим-пулъсного датчика и при использовании каждого фронта сигналов sin, cos в УЧПУ реализуется измеритель пути с дискретностью 10-4 оборота вала двигателя (10000 импульсов). В пределах одного оборота вала двигателя фаза выходного сигнала ФВ совершает два полных цикла изменения от 0 до 2¶ радиан (360 эл. Град). Этому изменению фазы соответстсвуют два периода Тп питающего напряжения ФВ или 1 мс. Суммарная длительность сигнала tДi, формируемая за полный оборот вала двигателя, также будет равна 1 мс. Дискретность изменения длительностей сигналов tДi равна 1/2000 периода Тп или 1/4000 оборота - вала двигателя и определяется отношением периода сигнала 4 МГц к периоду Тп. Если выделить моменты совпадения фронта сигнала ФН с уровнем лог. "0" или лог. "1" в сигнале 4 МГц, то диапазон измерения увеличивается в 2 раза, и за один оборот вала двигателя можно получить 8000 дискрет. Для получения 10000 импульсов необходимо выполнить умножение на 1,25, для чего число импульсов сначала умножают на 5, а потом делят на 4.
С помощью триггера 1F выделяются моменты совпадения фронта сигнала ФН с уровнем лог. "0" или лог. "1" в сигнале 4 МГц. Смещение фронта сигнала ФН из интервала, заданного уровнем лог. "0", в интервал, заданный уровнем лог, "1", сопровождается изменением состояния триггера 1F. Изменение состояния триггера вызывает формирование дополнительного импульса перемещения Имп длительностью 2,5 мкс, который заполняется пятью импульсами строба С5 частотой 2 МГц, что эквивалентно умножению на 5. Пять импульсов строба С5 в зависимости от направления движения поступают на вход "С+1" или "С-1" реверсивного счетчика и делятся на 4. Один избыточный импульс из пяти входных остается в счетчике и суммируется с последующими импульсами, таким образом потери информации о пути не происходит.
Информация о перемещениях, кратных более "грубой" дискрете, величина которой соответствует приращению фазы на 250 нс (периоду сигнала 4 МГц), вводится в реверсивный счетчик в виде длительности сигнала РзС4. В реверсивном счетчике формирователя сигнала ωвр длительность сигнала РзС4 увеличена в два раза относительно длительности сигнала tДτ, поэтому после умножения на 5 выравнивается "вес" импульсов строба С5 в реверсивном счетчике ФСП, поданных на его входы во время действия сигналов Имп и РзС4. На диаграмме рис. 33 показано соотношение между сигналами sin, cos в частных случаях, когда перемещение за период сигнала ФВ составляет 2∆, 2∆, 1∆, 1∆, 0∆, минус 1∆, минус 2∆.
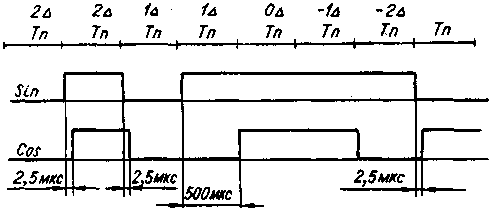
Сигнал нуль-метки НМ выдается один раз за электрический оборот ФВ и имеет фиксированный фазовый сдвиг 2 мкс относительно питающего напряжения ФВ. Ширина зоны нуль-метки соответствует 25 дискретам перемещения. Максимальная скорость перемещения, до которой выдается сигнал нуль-метки, соответствует приращению фазы выходного сигнала ФВ не более 1/200 периода "питающего напряжения за период выходного сигнала фазовращателя или примерно 5 оборотов в секунду. Погрешность выдачи сигнала НМ пропорциональна скорости перемещения и при указанной максимальной скорости составляет до 1/400 оборота двигателя; длительность сигнала НМ при этом минимальна и равна 500 мкс. Сигналы перемещения sin, cos и нуль-метки НМ выдаются каждый в прямом и инверсном виде.
В блоке ДОС2 производится обработка диагностических сигналов о состоянии одного или нескольких блоков электропривода, сигналов установки начального состояния элементе памяти, сигналов об уровнях напряжения во внешней и внутренней силовой сети и сигнала оперативного управления электроприводом.
Блок ДОС2 используется в нескольких вариантах электроприводов, отличающихся количеством управляемых координат, поэтому обозначения координат введены в обозначение сигналов.
Блок ДОС2 реализует следующие функции:
1. обработку диагностических сигналов функционирования регулятора частоты вращения и регулятора тока приводов подачи ФБ-XZ (блок РПП1). | Сигнала перегрева двигателей ПД привода подачи; сигналов об уровнях напряжения во внешней и внутренней силовой сети сигнала низкого напряжения НН, сигнала превышения напряжения ПН;
2. формирование объединенных по схеме ИЛИ сигналов установки при включении питания Уст.ВП и сброса памяти диагностических сигналов СПДС (Уст.ВП+СПДС);
3. прием и обработку входного сигнала оперативного управления приводом ОУП1;
4. формирование сигналов для цикла подключения электропривода к сети переменного тока ФБЭ-ОУП (объединенные по схеме И сигнал функционирования блоков электропривода ФБЭ и сигнал ОУП) и НН-ОУП (объединенные по схеме И сигнал низкого напряжения НН и сигнал ОУП);
5. прием сигнала "Силовое питание включено" СПВ и формирование разрешения включения приводов (переход сигнала запрета включения привода ЗВП с уровня лог. "1" в лог. "0");
6. формирование сигналов опорных частот 8 МГц, 200 кГц, 100 кГц, стробов С1-С6, сигнала зоны нуль-метки ЗНМ;
7. формирование синусоидальных напряжений sin 1ФВ, cos 1ФВ частотой 2 кГц и с разностъю фаз ¶/2 , которые используются для питания фазовращателей; сигнал sin 1ФВ используется в формирователях сигнала задания тока статора и э.д.с. Тзс+Ue в блоке РПП1;
8. индикацию отключения электропривода при исчезновении сигнала sin 1ФВ и (или) cos 1ФВ (индикатор V20), если выпрямленное напряжение менее (380±10) В (сигнал НН - индикатор V29) или при рекуперации возникло напряжение более (695±15) В (сигнал ПН - индикатор V28);
9. формирование логического сигнала ПН* путем преобразования уровней напряжения сигнала ПН;
10. формирование контактного сигнала "Готовность приводa";
11. возможность блокировки сигналов ФБ-S, ФБ-XZ, ПД, КПВ путем подачи сигнала режима контроля функционирования РКФ.
Структурная схема блока ДОС2 приведена на рис. 34.
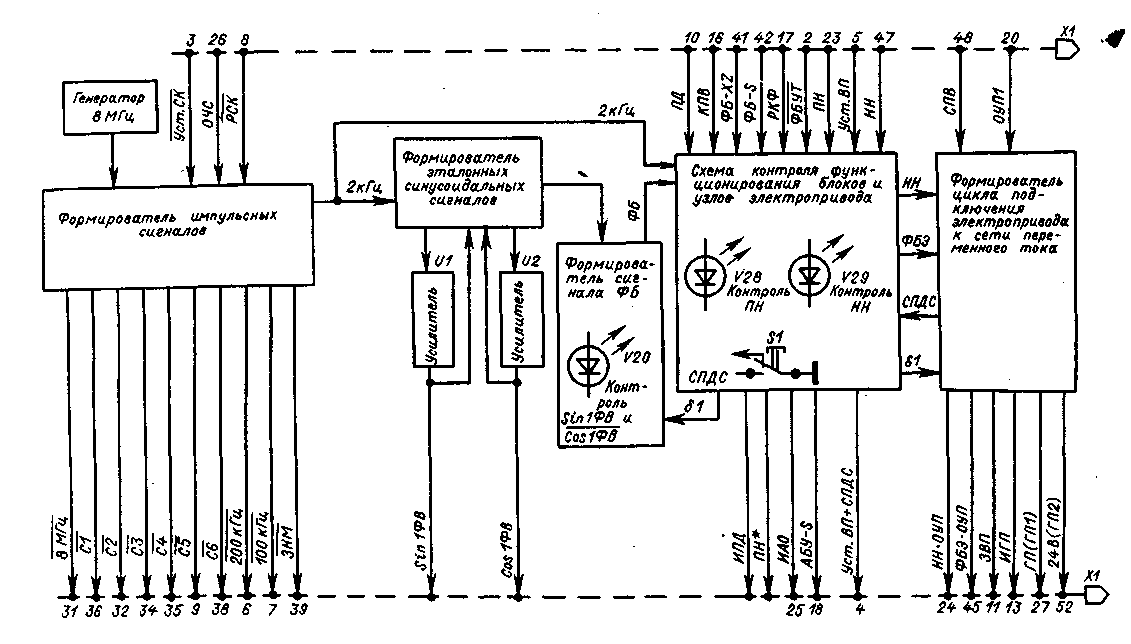
Рис. 34. Структурная схема блока ДОС2
Схема контроля функционирования блоков и узлов электропривода, осуществляющая диагностирование электропривода после включения питания и в процессе его дальнейшего функционирования, является основной частью схемы автоматики. Информационное содержание состояний сигналов, поступающих на вход схемы автоматики, а также формируемых ею, приведено в табл. 12. Уровень напряжения входных сигналов в состоянии "разрыв цепи" определяется схемой входных цепей блока-приемника этих сигналов.
Таблица 4
|
Обозначение сигнала |
Информационное содержание состояний |
|
ЗВП Выход ИАО Выход ИПД Выход КПВ Вход НН Вход НН-ОУП Выход ОУП1 Вход ПД Вход ПН Вход ПН* Выход РКФ Вход СПВ Вход Уст.ВП Вход Уст.ВП+.СДЦС Выход ФБ ФБ-XZ вход |
Лог. "1" - запрет включения приводов (запрет формирования всех сигналов, зависимых от сигналов ВПП); лог. "0" - разрешение включения привода Лог. "0" - приводы функционируют, индикатор "?" не светится; 2 В - аварийное отключение приводов, индикатор "?" светится Лог. "0" - температура обмоток двигателей меньше (150-23) °С, индикатор "¦" не светится; 2В- температура обмоток двигателя больше (150-23) ° С, индикатор "¦" светится Минус 15 В - выключатель QF3 блока ВЗЗ включен; разрыв цепи - выключатель QF3 выключен Минус 15 В - постоянное напряжение на входе ИП больше (380±10) В разрыв цепи - напряжение меньше (380±10) В Лог. "0" - разрешение управления тиристорным инвертором и выпрямителем; лог. "1" - блокировка управления Минус 15 В - команда оперативного управления приводами (включение силового питания инверторов, разрешение включения приводом); разрыв цепи - отмена команды оперативного управления приводом Лог. "0" - температура обмоток двигателей менее (150±23) °С; лог. "1" - температура одного или нескольких двигателей более (150±23) °С Минус 15 В (лог. "0") - напряжение в силовых цепях звена постоянного напряжения меньше (695±15)В; разрыв цепи (лог. "1") - напряжение больше (695±15)В Примечание, В скобках указаны логические уровни сигнала ПК*. Минус 1 5 В - задание режима контроля функционирования; разрыв цепи - запрет режима контроля функционирования Лог. "0" - силовое питание транзисторных инверторов включено; лог. "1" - силовое питание выключено Разрыв цепи - установка при включении и перед выключением источника питания; от минус 10 до минус 15 В - отсутствие установки Объединенные по схеме ИЛИ сигнал Уст.ВП и сигнал сброса памяти диагностических сигналов СПДС, Сигнал выдается разрывом цепи минус 15В при включении и перед выключением источника питания, а также при включении ОУП1 и при нажатой кнопке S1 в блоке ДОС2 Внутренний сигнал блока ДОС2 лог. "0" - блок функционирует; лог. "1" - неисправность блока Лог. "0" - нормальное функционирование блоков РПП1 лог. "1" - неисправность одного или обоих блоков РПП1 |
Команда ОУП1 формируется в схеме автоматики станка и поступает в блок ДОС2 в виде (напряжения минус 15 В ), заданного относительно цепи 0 В. Сигналы РКФ, КПВ, ПН, Уст.ВП формируются соответствующими блоками электропривода и на входе блока ДОС2 фильтруются. Фильтры-формирователи в цепях сигналов РКФ, КПВ обеспечивают задержку на включение 8 мс, а на отключение - 15 мс. Фильтры в цепях сигналов ПН, НН, Уст.ВП обеспечивают защиту от высокочастотных помех, возникающих в цепях межблочных связей. Команда ОУП1 поступает в схему через две последовательно включенные цепи задержки, выполненные на компараторах 1А и 4К. Первая схема формирует задержку 3 (рис. 35) длительностью около 1 с при подаче команды ОУП1Г при отмене команды ОУП1 - задержка не более 10 мс. Вторая схема необходима для формирования сигнала СПДС (интервал 4 на рис. 35), который формируется только после подачи команды ОУП1 . Неравные по величине задержки при подаче и отмене команды ОУП1 позволяют реализовать цикл аварийного управляемого отключения АУО, который должен формироваться всегда, если в процессе обработки произошла отмена команды ОУП1. Силовая цепь электропривода может быть подключена к сети переменного тока по команде ОУП1 , если одновременно выполняются следующие условия:
нет превышения напряжения (уровень сигнала ПН минус 15 В);
нет низкого напряжения (уровень сигнала НН минус 15 В;
нет перегрева двигателей (уровень сигнала ПД лог. "0");
питание вентилятора включено (уровень сигнала КПВ минус 15 В);
функционирует блок РПП1 (уровень сигнала ФБ-XZ лог, "0");
функционирует блок ДОС2 (уровень внутреннего сигнала ФБ лог. "0").
При этом сигнал функционирования блоков и устройств электропривода ФБЭ переходит в состояние лог "0" (сигнал в КТ11, рис. 35).
После включения источника питания сигналы ФБУТ, ФБ-XZ содержат информацию о частичном контроле функционирования блока управлений тиристорами, блока РПП1 и достоверны только после прохождения сигнала Уст.ВП. Внутренний сигнал ФБ формируется после того, как амплитуды
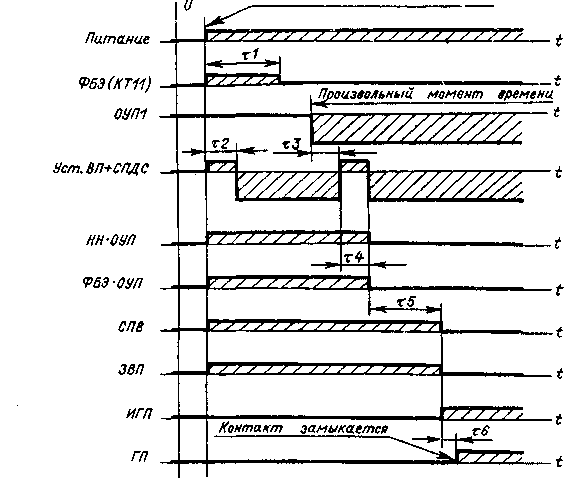
Рис. 35. Диаграммы подключения электропривода к сети переменного тока:
1 - время формирования общей готовности блоков
электропривода (3-5) с, т.е. сигнала ФБЭ;
2 - установка при включении питания (200-500) мс;
3 - задержка входной цепи на включение по сигналу
ОУГП (не более 1 с);
4 - время сброса памяти диагностических сигналов (200-300) мс при появлении сигнала ОУП1;
5 - время управляемого заряда конденсаторов С1...С60 до напряжения 540 В не более 1 с;
6 - время срабатывания реле КЗ в блоке ДОС2 не
более 10 мс
сигналов sin 1ФВ и cos 1ФВ достигнут номинальных уровней, то есть через 3-5 с после включения питания., от этого зависит время формирования 1 (см. рис. 35). Если сигнал ФБЭ находится в состоянии лог. "0" и подана команда ОУП1, формируется цикл подключения . электропривода к сети переменного тока ЦПЭ (см. рис. 35).
С момента появления команды ОУП1 формируется интервал 0, а следом за ним - интервал 4. По окончании интервала 4 сигналы НН·ОУП и ФБЭ·ОУП переходят в состояние лог. "0". Одним из выходных сигналов этой схемы является сигнал "Силовое питание включено" СПВ, который поступает в блок ДОС2 на вход формирователя цикла подключения электропривода к сети переменного тока, где по сигналу СПВ разрешается включение привода (сигнал ЗВП переходит в состояние лог. "0"), формируется сигнал индикации готовности приводов ИГП и сигнал готовности привода. На этом ЦПЭ заканчивается, т.е. он включает в себя интервалы 3, 4, 5, 6.
В момент времени, когда закончился сброс памяти диагностических сигналов, запускается схема, формирующая интервал времени длительностью от 6 до 9 с (компаратор 5F). Если в течение этого интервала сигнал СПВ на вход блока ДОС2 не поступил, то ситуация оценивается как аварийная. В этом случае сигнал контроля времени заряда конденсаторов КВЗК (КТ9) переходит в состояние лог. "1", и, следовательно, формируется сигнал МАО. Повторное формирование цикла подключения электропривода к сети переменного тока возможно только после повторной подачи команды ОУП1.
Отключение электропривода от сети переменного тока осуществляется отменой команды ОУП1 или из-за неисправностей блоков управления. Воздействие, которое оказывается на приводы в случае отмены команды ОУП1, а диаграммы сигналов, формируемых в блоках электропривода, приведены на рис. 36.
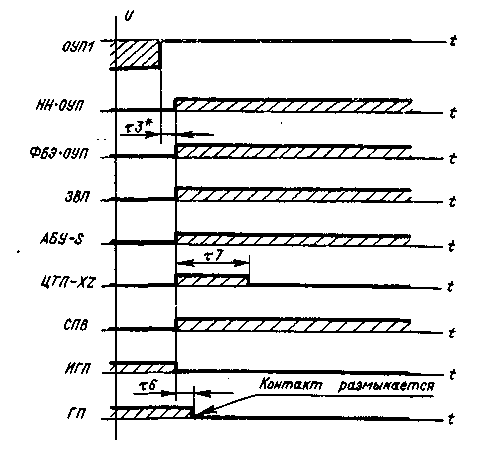
Рис. 36. Диаграммы отключения электропривода от сети переменного тока:
3* - задержка входной цепи на отключение по сигналу ОУП1 (не более 10 мс);
6 - указано на рис. 35;
7 - цикл торможения привода подачи (не более 1 с)
В блоке ДОС2 установлены световые индикаторы V20, V28, V29, сигнализирующие об аварийных ситуациях;
индикатор V20 - отсутствие одного из сигналов sin 1ФВ или cos 1ФВ или обоих одновременно;
2. индикатор V29 - на выходе выпрямителей имеется или кратковременно существовало напряжение менее (380±10) В (индикация сигнала НН);
3. индикатор V28 - при рекуперации в силовых цепях напряжение достигало (695±l5) В (индикация сигнала ПН).
Сброс индикации сигнала ПН осуществляется сигналом Уст.ВП, который формируется при включении и перед выключением ИП. Сброс индикации сигнала НН осуществляется сигналом Уст.ВП+СПДС, сигнал СПДС формируется при подаче сигнала ОУП1.
Исправность индикатора может быть проверена в момент действия сигнала Уст.ВП+СПДС, а также от кнопки S1, установленной в блоке ДОС2. При включении питания во время действия сигнала Уст.ВП все индикаторы должны светиться. Свечение индикаторов будет и после подачи на блок ДОС2 сигнала ОУП1, т.е во время действия сигнала СПДС. Длительность свечения при проверке не превышает 0,4 с. Включение индикаторов на более длительное время осуществляется в ручном режиме с помощью кнопки S1.
Диагностические сигналы ФБ-XZ, КПВ, ПД могут быть заблокированы сигналом РКФ.
Генератор со стабилизацией частоты с помощью кварцевого резонатора формирует импульсы 8 МГц, из которых путем деления по частоте и логических преобразований промежуточных сигналов формируются сигналы стробов C1, C2, СЗ, С4, С5, C6 опорных частот 200 кГц, 100 кГц, 2 кГц, сигнал зоны нуль-метки 3НМ. Эта часть схемы блока ДОС2 проверяется методом контроля сигнатур, для чего имеются входы для сигналов:
1. Уст.СК - начальная установка;
2. РСК - задание режима сигнатурного контроля;
3. ОЧС - опорная частота в режиме сигнатурного контроля.
Формирователь эталонных синусоидальных сигналов ФЭСС выполнен в виде системы автоматического регулирования фазы и амплитуды (САРФА) на основе активного фильтра (рис. 37). Активный RC-фильтр на операционных усилителях обеспечивает выделение первой гармоники из сигнала прямоугольной формы 2 кГц и ослабление других гармонических составляющих так, что коэффициент нелинейных искажений выходных синусоидальных сигналов не превышает 0,25 % .
Емкость конденсатора С6 и величина индуктивности L эквивалентной схемы фильтра (рис. 38) определяют его резонансную частоту:
где Тр - период резонансной частоты.
При совпадении периодов Тр и сигнала 2 кГц происходит максимальное усиление первой гармоники, коэффициент передачи на резонансной частоте (добротность) Q=ωp·R10·C6. Индуктивность L имитируется цепью, образованной инвертором (R14-6B-R16), интегратором (R19-8B-C12) и эквивалентным сопротивлением цепи, включенной между выходом усилителя 8В и инвертирующим входом усилителя 8А (величина этого эквивалентного сопротивления зависит от напряжения на затворе транзистора V2). Ток, протекающий через эквивалентное сопротивление, отстает по фазе от выходного напряжения усилителя 8А, что равносильно включению индуктивности в цепи обратной связи усилителя 8А.
Активный фильтр представляет собой комплексное сопротивление и в зависимости от соотношения частот ω и первой гармоники сигнала 2 кГц вносит некоторый фазовый сдвиг, причем, при совпадении частот вносимый фазовый сдвиг равен нулю и коэффициент передачи максимален. Это свойство активного фильтра используется для поддержания максимального коэффициента передачи путем точной фазовой синхронизации сигналов 2 кГц и выходного сигнала усилителя 8А (sin 1ФВ*).
Синхронизацию сигналов 2 кГц и sin 1ФВ* обеспечивают элементы схемы автоматической подстройки фазы САПФ. К ним относятся (см. рис. 37) фазовый компаратор ФК, выполненный на D-триггере, фильтр низкой частоты ФНЧ, формирователь Ф.
D-триггер определяет фазовые соотношения (опережение или отставание) между его входными сигналами (на входах D и С). Фильтр и элементы автоматической подстройки фазы образуют релейную систему автоматического регулирования фазы САРФ. Возникающие в САРФ колебания поддерживают среднее значение разности фаз между сигналами 2 кГц и sin 1ФВ*, равное нулю, при весьма малых амплитудах отклонения фазы от нулевого значения. Перепады выходного напряжения триггера, возникающие в процессе работы САРФ, с помощью двухзвенного фильтра низкой частоты ФНЧ преобразуются в напряжение, средний уровень которого зависит от скважности импульсов на выходе триггера. Это напряжение определяет величину сопротивления канала исток - сток транзистора V2, следовательно, воздействует на значение индуктивности L, что эквивалентно воздействию на частоту настройки активного фильтра. Триггер включен так, что при переключениях триггера возникает изменение напряжения на затворе полевого транзистора, которое уменьшает разность фаз между сигналами 2 кГц и sin 1ФВ*. Формирователь Ф преобразует синусоидальное напряжение в напряжение прямоугольной формы и служит для согласования уровней сигналов и увеличения чувствительности D-триггера по фазе.
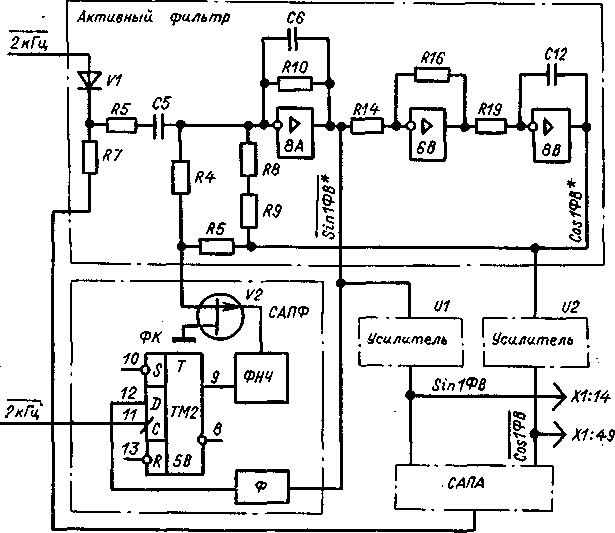
Рис. 37. Функциональная схема ФЭСС:
САПА - схема автоматической подстройки амплитуды; САПФ -схема автоматической подстройки фазы; Ф - формирователь; ФК -фазовый компаратор; ФНЧ - фильтр низкой частоты
Рабочий фронт выходного сигнала Ф формируется при переходе синусоиды через нуль от отрицательного значения к положительному.
Формирование второго напряжения cos 1ФВ* со сдвигом по фазе относительно напряжения sin 1ФВ* на ¶/2 осуществляется усилителем 8В, включенным по схеме RС-интегратора.
Коэффициенты передачи усилителей 6В и 8В равны единице.
Синусоидальные сигналы sin 1ФВ* и cos 1ФВ* усиливаются по мощности усилителями U1, U2, каждый из них содержит операционный усилитель 7L (8L), генераторы тока на транзисторах VI0 и VI3, эмиттерные повторители на транзисторах V16 и V17, схемы защиты от превышения тока нагрузки (резисторы R48 и R49, транзисторы V14 и V15). Коэффициент передачи усилителей равен 2 и задан соотношением величин резисторов R39 и R37; для исключения возбуждения усилителей при подключении кабелей связи с датчиками положения (фазовращателями) включены резисторы R38, R41 и конденсатор С23. Если ток нагрузки превышает 85 мА, в транзисторах V14 и V15 возникает коллекторный ток, который уменьшает базовый ток транзисторов V16, V17 и таким образом стабилизирует ток нагрузки; выходное напряжение может снизиться до 0 В. Из-за разброса параметров транзисторов V14, V15 и резисторов R48, R49 точность срабатывания защиты примерно 20 %.
Для стабилизации величины выходных сигналов sin 1ФВ и cos 1ФВ введена схема автоматической подстройки амплитуды. Эталонная величина задана в виде тока через резистор R35 от источника напряжения 5 В. Интегратором 8Е выделяется разность между эталонным значением тока и значением компенсирующего тока, протекающего через резистор R36. Диаграммы сигналов на выходе источника компенсирующего тока приведены на рис. 39. Среднее значение пульсирующего напряжения на анодах диодов V7, V8 при выбранных значениях резисторов R35, R36 и амплитудных значениях сигналов sin 1ФВ, cos 1ФВ 8,4 В равно минус 4,7 В. Если по какой-либо причине среднее значение напряжения имеет другое значение, то интегратором 8Е формируется выходное напряжение соответствующей величины и полярности ∆U, которым корректируется величина тока через резистор R5, следовательно, и амплитуда выходных сигналов sin 1ФВ и cos 1ФВ.
По величине выходного напряжения интегратора оценивается функционирование активного фильтра и выходных усилителей U1, U2. Если величина одного или обоих сигналов sin 1ФВ и cos 1ФВ уменьшилась настолько, что на выходе интегратора 8Е сформировалось напряжение, превышающее уставку компаратора 7Е формирователя сигнала ФБ, то это состояние расценивается как аварийное и выдается сигнал неисправности блока ДОС2 (сигнал ФБ в состоянии лог. "1"). Воздействие этого сигнала на схему автоматики в составе электропривода описано ранее. Компаратор 7Е выполнен по схеме, аналогичной приведенной на рис. 33; дополнительно с помощью резистора R54 в него введена цепь положительной обратной связи, которая для сигналов положительной полярности формирует характеристику компаратора 7Е "гистерезисного" типа. После переключения компаратора 7Е напряжение на его входе 3 уменьшается примерно на 30 % за счет параллельного подключения резисторов R51 и R54. Обратное переключение компаратора 7Е может произойти, если его вводное напряжение уменьшится также на 30 %.
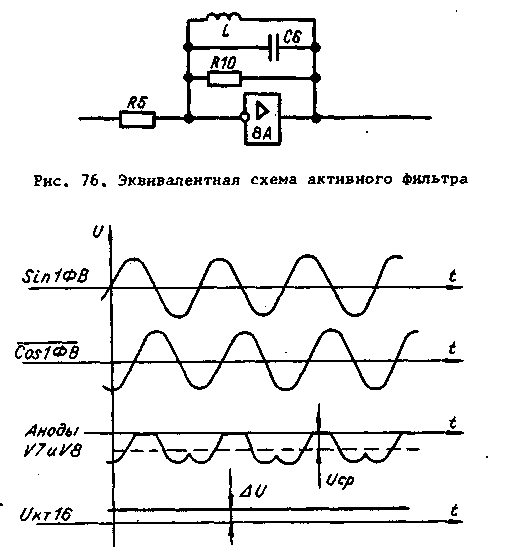
Рис. 39. Диаграммы сигналов схемы автоматической подстройки амплитуды:
Ucp - среднее значение напряжения на анодах V7 и V8 (около минус 5 В); ∆U - выходное напряжение интегратора 8Е
Источник питания ИП обеспечивает:
1. преобразование постоянного напряжения 400-700 В в стабилизированные напряжения 15 В, минус 15 В и 5 В с параметрами, приведенными в табл. 5;
2. генерирование переменного напряжения прямоугольной формы частотой (800±240) Гц амплитудой (28±1,5) В;
3. формирование сигнала установки при включении питания Уст.ВП;
4. выравнивание напряжения на последовательно-соединенных конденсаторах звена постоянного напряжения;
5. защиту конденсаторов звена постоянного напряжения от внутренних коротких замыканий путем формирования сигнала ПН.
Параметры источников стабилизированных напряжений приведены в табл. 5.
Источник переменного напряжения для питания силовых ключей обеспечивает ток нагрузки 2 А при амплитуде напряжения /28±1,5/ В; частота выходного напряжения от 560 до 1040 Гц; постоянная составляющая выходного напряжения не более 10 мВ.
Сигнал установки при включении питания Уст.ВП выдается отключением на время от 300 до 500 мс цепей нагрузки сигнала от источника минус 15 В, максимальный ток нагрузки не более 20 мА.
Таблица 5
|
Номинальное напряжение, В |
Параметр |
||
|
Допустимое отклонение, В |
Максимальный ток нагрузки, А |
Амплитуда пульсаций, мВ |
|
|
5 15 минус 15 |
±0,15 ±0,75 ±0,75 |
10 2 2 |
50 200 200 |
Диаграммы состояния сигналов НН и ПН в функции от напряжения на выходе ЗПН приведены на рис, 40.
В формирователе сигнала НН при напряжении до /380-10/ В,+а в формирователе сигнала ПН - свыше (695±15) В транзисторный ключ, включенный между источником минус 15 В и нагрузкой, находится в непроводящем состоянии, что эквивалентно разрыву цепи.
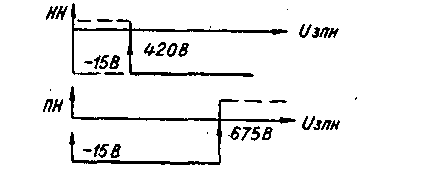
Рис. 40. Диаграммы состояния сигналов НН, Ш в функции от величины напряжения ЗПН
В ИП имеется элемент системы защиты от случайного включения блоков управления, в разъем кассеты, не предназначенный для этого типа блоков. В этом случае цепь сигнала блокировки БИ соединяется с шиной 0 В и создаются условия, исключающие нормальное функционирование источника, поэтому выходные напряжения не Формируются.
Для собственных нужд в ИП имеются следующие- источники:
1. источник оперативного напряжения, предназначенный для питания схемы управления стабилизаторов и схем защиты;
2. источник сигнала 4 кГц, выполненный по схеме мультивибратора на операционном усилителе (задающий генератор);
3. два источника эталонного напряжения.
Конструктивно ИП выполнен в виде моноблока, несущим элементом которого является ребристый теплоотвод. На теплоотводе смонтировано П-образное основание, с внешней стороны которого размещены печатные платы ПЛ312, ПС251-1, П317. В объемной части блока размещены диоды V12...V19 выпрямителя, трансформатор Т4, дроссели фильтров L1...L3, конденсаторы фильтров С4...С10, тумблер оперативного отключения источника S1.
На плате ПЛ312 размещены элементы высоковольтного модулятора: транзисторы V3, V4, диоды Vl, V2, трансформаторы управления Т2, ТЗ, трансформатор защиты модулятора по току Т1.
Плата ПС251-1 содержит низковольтные элементы стабилизаторов 15 В, минус 15 В, схему контроля высокого напряжения, схему контроля температуры.
На плате П317 расположены элементы схемы защиты, схема запуска источника, источник оперативного напряжения, источник напряжения питания силовых ключей.
Структурная схема ИП приведена на рис.41.
Стабилизатор -15 В выполнен на базе полумостового статического преобразователя постоянного напряжения в постоянное с широтно-импулъсной стабилизацией средне-выпрямленного напряжения вторичной обмотки трансформатора Т4. В состав стабилизатора входят: широтно-импульсный регулятор ШИР, счетный триггер СТ, схема управления ключами, высоковольтный модулятор на транзисторах V3, V4, двухполупериодный выпрямитель V16...V19 с LC-филътрами, выходное напряжение которых используется для питания нагрузки. Диаграммы, поясняющие работу ШИР, СТ, СУ приведены на рис. 42.
В состав широтно-импульсного регулятора входят усилитель рассогласования с пропорционально-интегральной обратной связью на микросхеме 2С и компаратор напряжения на микросхеме 1D. Выходной сигнал усилителя рассогласования определяется разностью эталонного напряжения Uэт+5 В и напряжения, пропорционального среднему значению напряжения на выходе выпрямителя (диоды VI7, VI8 объемного блока), которое выделяется RC-филътром (резисторы R4, R7, R9 и конденсатор С41). При включении источника питания темп нарастания напряжения 15 В (минус 15 В) регулируется так же усилителем рассогласования благодаря определенному темпу роста напряжения на конденсаторе С2, заданному резистором R3 от источника Uэт+5 В, и регулирования напряжения на резисторе R9 в функции тока через дроссель L2 (тока заряда конденсаторов С9, С10 -фильтра источника 15 В). Ток через конденсатор С41 в процессе роста напряжения на конденсаторах С9, С10 косвенно характеризует величину тока в дросселе L2 и является током цепи отрицательной обратной связи ЩИР, поэтому воздействует на время достижения напряжениями номинальных значений 15 В (минус 15 В).
При отсутствии сигнала разрешения работы РР (обрыв цепи) конденсатор С2 подключен к цепи Uoп-15 В через диод VI и резистор R1. После нарастания оперативных напряжений до уровня примерно 8 В выдается сигнал РР уровнем Uoп+15 В, диод VI запирается и начинается заряд конденсатора С2 от напряжения Uэт+5 В через резистор R3, с постоянной
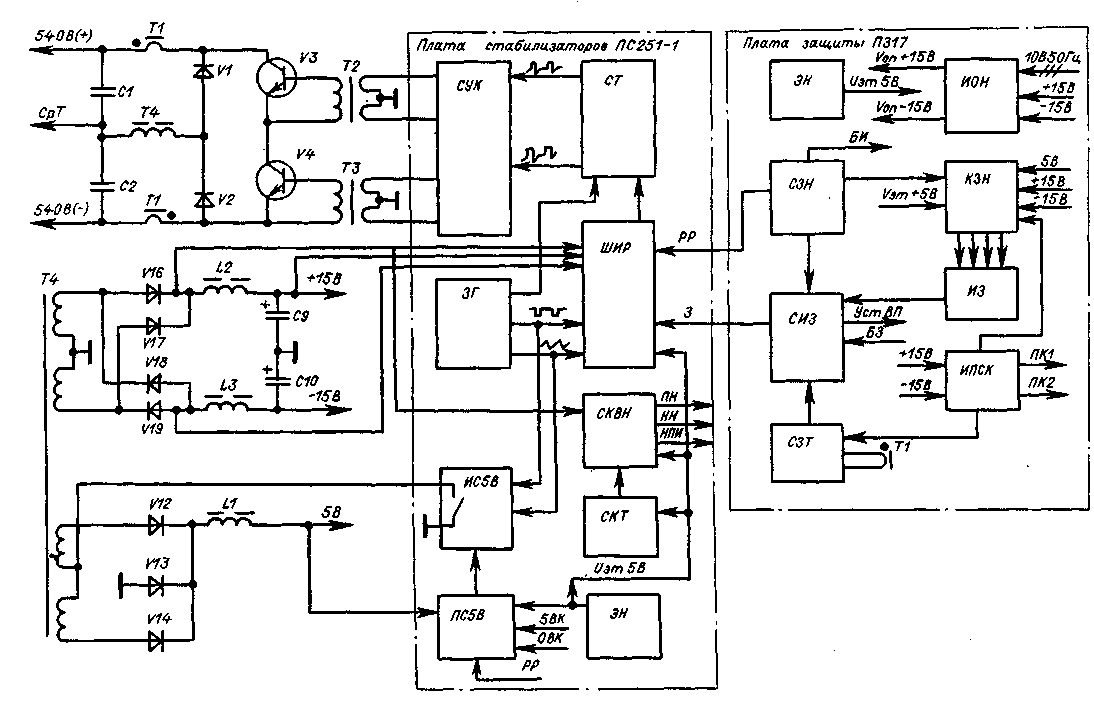
Рис.41.Структурная схема ИП
ЗГ - задающий генератор
ИЗ - схема индикации защиты
ИОН - источник оперативного напряжения
ИС5В - импульсный стабилизатор 5 В
ИПСК - источник питания силовых ключей
КЗН - компараторы защиты по напряжению
ПС5В - параллельный стабилизатор 5 В
СЗИ - схема запуска источника
СЗТ - схема защиты по току
СИЗ - схема исполнения защиты
СКТ - схема контроля температуры
СКВН - схема контроля высокого напряжения
СТ - счетный триггер
СУК - схема управления ключами
ШИР - широтно-импульсный регулятор
ЭН - эталон напряжения
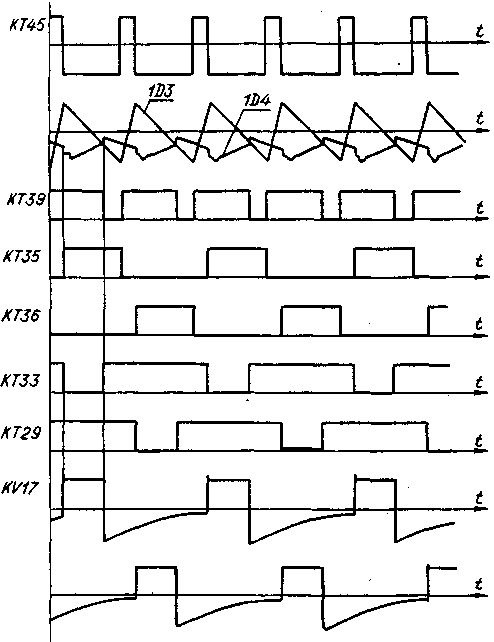
Рис. 42. Диаграммы сигналов широтно-импульсного регулятора счетного триггера и схемы управления ключами
времени около 9 мс, который сопровождается снижением выходного напряжения усилителя рассогласования. ШИР начинает функционировать, когда напряжение на входе 4 компаратора 1D становится меньше напряжения на входе 3. Управление темпом нарастания напряжения исключает перенапряжения в LC-фильтрах источников напряжения 15 В и минус 15 В.
Выходной сигнал усилителя рассогласования на инвертирующем входе компаратора 1D суммируется с сигналом равным разнице амплитуд положительного и отрицательного импульсов вторичной обмотки трансформатора Т4, возникающей в результате неравенства напряжений на конденсаторах С2, СЗ блока ВЗЗ. Выделение разности амплитуд осуществляется цепочкой, состоящей из резисторов R2, R8, конденсатора С1, диодов V2, V3. На вход цепочки поступают от диодов V19, V20 объемного блока импульсы отрицательной полярности. Конденсатор С1 заряжается через диод V2 и резистор R2 до амплитуды наибольшего импульса, при этом сигнал на выходе цепочки в контрольной точке КТ37 равен падению напряжения на открытом диоде V2 (минус 0,67 В). Постоянная времени разряда конденсатора С1 по цепи резистор R8 -диод V3 много больше периода следования импульсов, поэтому при поступлении на вход цепочки импульса меньшей амплитуды в КТ37 появится сигнал величиной отличной от минус 0,67 В. Сигнал в КТ31, воздействуя на компаратор ШИР, увеличивает длительность импульса большей амплитуды и уменьшает длительность импульса меньшей амплитуды и таким образом выравнивает напряжения на емкостном делителе. На другой вход компаратора ШИР подается напряжение пилообразной формы от задающего генератора. На выходе компаратора в КТ39 появляются импульсы положительной полярности, длительность которых соответствует длительности открытого состояния ключей высоковольтного модулятора. Для исключения нестабильности на фронтах импульсов введена положительная обратная связь: резистор R15 подключен между выходом компаратора и входом балансировки NC. По этому входу фиксируется переход выходного транзистора компаратора в открытое состояние в момент, когда напряжение пилы становится меньше, чем сигнал рассогласования. Сброс этого состояния осуществляется транзистором V29 во время положительного прямоугольного импульса генератора. Открытое состояние выходного транзистора компаратора 1D соответствует закрытому состоянию транзистора V8 и, соответственно, закрытому состоянию ключей высоковольтного модулятора на транзисторах V3, V4 объемного блока.
Питание счетного триггера осуществляется через ключ на транзисторе V10, который формирует импульс напряжения положительной полярности на время отрицательного импульса задающего генератора. За время импульса происходит заряд одного из конденсаторов С5 или С6. Заряженный конденсатор в следующем интервале удерживает связанный с ним транзистор в запертом состоянии и тем самым переключает ток в другой конденсатор. Выходные сигналы триггера приведены на рис. 42; отрицательные фронты формируются отрицательными фронтами напряжения, питающего триггер. Сигналы с коллекторов V11, V12 поступают на базы транзисторов V15, V16, эмиттеры которых подключаются к цепи 0 В транзистором V8 ШИР. Импульсы включения (отключения) транзисторов V3, V4 высоковольтного модулятора получают с помощью трансформаторов гальванической развязки Т2, ТЗ. Для согласования параметров трансформаторов Т2, ТЗ и счетного триггера предназначена схема управления ключами, которая построена по схеме ключевого усилителя мощности на транзисторах V17...V20. Открытое состояние транзистора V17 соответствует открытому состоянию транзистора V3 высоковольтного модулятора, открытое состояние VI8 -открытому состоянию V4. Транзисторы V19, V20 открыты в течение времени закрытого состояния транзисторов VI7, VI8 и осуществляют размагничивание магнитопроводов трансформаторов Т2, ТЗ. Диоды V21...V24 предназначены для замыкания индуктивных токов трансформаторов в моменты коммутации транзисторов V17...V20 Транзистор V8 является элементом системы защиты 3. В рабочем режиме при срабатывании защиты ток в цепи сигнала 3 прерывается, транзистор V8 закрывается и управление транзисторами V3, V4 высоковольтного модулятора прекращается.
Стабилизированное напряжение 5 В получают с помощью импульсного и параллельного стабилизаторов 5 В.
Источником питающего напряжения стабилизатора 5 В служит вторичная обмотка трансформатора Т4, средняя точка которой через регулирующий элемент импульсного стабилизатора подключена к цепи 0 В, а выводы - к анодам диодов V12, V14 выпрямителя. Выпрямитель подключен к дросселю фильтра L1, к выходу которого параллельно нагрузке подключен регулирующий элемент параллельного стабилизатора управляемый сигналом разности между эталонным напряжением и напряжением 5 В на кассете с блоками управления.. РЭ импульсного стабилизатора управляется импульсами, длительность
которых определяется величиной тока через регулирующий элемент параллельного стабилизатора. Диаграммы сигналов импульсного стабилизатора приведены на рис. 43. Для исключения субгармонических колебаний в импульсном стабилизаторе на его схему управления поступают синхронизирующие напряжения с задающего генератора. Схема сравнения импульсного стабилизатора выполнена на компараторе 5D, на вывод 4 которого подается сигнал, пропорциональный току параллельного стабилизатора, а на вывод 3 - напряжение уставкй тока (резисторы R66, R68) совместно с пилообразным напряжением задающего генератора (через конденсатор С2 и резистор R67). Компаратор 5D охвачен цепью положительной обратной связи с выхода на вход балансировки NC для устранения нестабильности на фронтах импульсов. Сигнал с выхода компаратора 5D (КТ41) через инвертор на транзисторе V36 поступает на управление регулирующим элементом на транзисторах V38...V40.
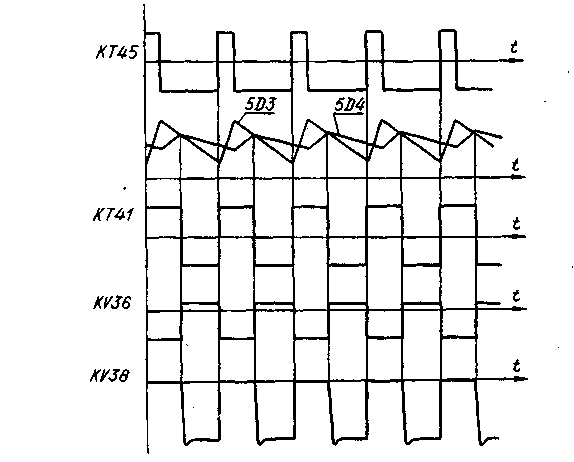
Рис. 43. Диаграммы сигналов импульсного стабилизатора 5 В
Схема сравнения параллельного стабилизатора выполнена на усилителе 4С, на один вход которого поступает эталонное напряжение Uэт+5 В, а на другой - выходное напряжение 5 В, таким образом формируется сигнал рассогласования, управляющий регулирующим элементом на транзисторах V43...V45. Сигнал, пропорциональный току РЭ параллельного стабилизатора, снимается с резистора R91 и через транзистор V46 поступает на схему сравнения импульсного стабилизатора. Для исключения влияния линии связи источника 5 В с нагрузкой введена обратная связь с кассеты блоков управления. Она осуществлена с помощью микросхем 4Е и 4D. На усилителе 4Е собран параллельный сумматор, который "призывает" напряжение на кассете к цепи 0 В источника. Напряжение с выхода сумматора (КТ40) поступает на компараторы защиты по напряжению (плата П317) и на вход интегратора 4D разностного сигнала, на другой вход которого приходит эталонное напряжение. Выходное напряжение интегратора (КТ38) воздействует на схему сравнения, компенсируя падение напряжения в линии связи от источника до кассеты.
Источник питания силовых ключей выполнен по схеме мостового автогенератора. Схема формирует симметричное знакопеременное напряжение прямоугольной формы, снимаемое с диагонали моста, которое используется для питания первичных обмоток трансформаторов гальванической развязки схем управления силовых ключей. Частота переключений автогенератора определяется величиной знакопеременного порога компаратора ЗА и постоянной времени интегратора 3В. Величина порога компаратора ЗА определяется делителем на резисторах R45, R46, а за счет параллельного подключения конденсатора С18 и диодного моста V24...V27 в процессе запуска источника меняется от 1,2 В (падение напряжения на двух диодах) до половины напряжения 15 В. Поскольку постоянная времени интегратора не зависит от напряжения питания, то также меняется и период колебаний, и, следовательно, частота выходного напряжения в процессе запуска меняется от 6 кГц до 800 Гц. Это сделано для того, чтобы исключить в момент запуска броски тока через выходные транзисторы, возникающие из-за остаточного намагничивания трансформаторов. С выхода компаратора ЗА сигнал поступает на согласующие транзисторы V29, V30, V43, V44. При положительном импульсе компаратора ЗА открывается транзистор V29 и связанный с ним транзистор V44, это приводит к открыванию диагонали моста на транзисторах V31, V33, V40, V42. Для исключения сквозных токов в транзисторах моста во время коммутации формируется пауза в управлении с помощью конденсатора С21.
Для контроля высокого напряжения используется выпрямленное напряжение вторичной обмотки трансформатора Т4, которое подается на пик-детектор, выполненный с помощью диода V25, резисторов R39...R43, конденсатора С8. На конденсаторе С8 выделяется напряжение, пропорциональное амплитуде напряжения на вторичной обмотке трансформатора. Т4, т.е. пропорциональное напряжению звена постоянного напряжения. Напряжения, сформированные на выходах резистивного делителя напряжения R40...R43 сравнивается с помощью компараторов 2В, 3В с напряжением Uэт+5 В, таким образом формируются сигналы НН и ПН, Напряжение с выхода делителя поступает также на неинвертирующий вход усилителя 4В для формирования сигнала НПИ, уровень которого равен 6,6 В при напряжении звена постоянного напряжения 540 В.
Схема контроля высокого напряжения является элементом защиты силовой батареи конденсаторов звена постоянного напряжения. При коротком замыкании одного из конденсаторов силовой батареи возникает перекос напряжений на емкостном делителе источника. Когда напряжение на одном из конденсаторов делителя достигает 350 В, выдается сигнал ПН, происходит блокировка управления тиристорного выпрямителя и разряд силовой батареи с помощью короткозамыкателя.
Схема запуска источника состоит из несимметричного триггера на транзисторах V3...V5, одновибратора 5С и формирователя сигнала разрешения работы РР на транзисторе V1. Несимметричный триггер переходит в состояние "включено" (проводимость транзисторов V3, V4) через 800 мс после подачи оперативных напряжений либо после переключения тумблера S1 в положение "вверх" (сигнал БИ - 5 В). Время задержки определяется постоянной времени конденсатора С2.Отрицательный перепад напряжения на коллекторе транзистора V3 открывает транзистор V1 (формируется сигнал разрешения работы РР) и через дифференцирующую RC-цепочку (конденсатор С1, резистор R8) формирует на коллекторе транзистора V6 короткий (длительностью около 10 мкс) импульс начальной установки триггеров схемы индикации и схемы защиты по току и запускает одновибратор 50. Импульс длительностью от 400 до 600 мс с выхода 6 через транзистор V9 блокирует на время запуска компараторы защиты по минимальному уровню напряжений компараторов AN1, AN2, (5↓, 15↓), а с выхода 1 одновибратора 5С поступает в схему исполнения защиты для формирования сигнала Уст.ВП.
Компараторы защиты по напряжению формируют сигналы: минимального напряжения 5В-"5↓" - на уровне 4,4 - 4,75 В, минимального напряжения 15 В - "15↓", определяемого по минимальному уровню амплитуды напряжения питания силовых ключей ПК1, ПК2 на уровне 24 - 26 В, превышения напряжения 5 В - "5↑" -на, уровне 5,25 - 5,6 В. и превышения напряжения 15 В - "15↑" на уровне 16,75 - 17,5 В. На компараторах AN1...AN4 сравниваются напряжение эталона Uэт+5 В и уровни выходных напряжений, заданных через соответствующие резистивные делители. При срабатывании компаратора на его выходе формируется уровень лог. "0", который поступает в схему индикации защиты и там после инвертирования на соответствующий вход триггера 5Е. На вход синхронизации триггера поступает инверсный импульс длительностью 3-4 мкс с выхода одновибратора 5D.
Одновибратор запускается сигналами с выходов компараторов защиты AN1...AN4, по заднему фронту импульса одновибратора происходит запись в триггер 5Е, на соответствующем выходе которого появляется уровень лог. "0" и начинает светиться связанный с ним светодиод (V10...V13). Для исключения перезаписи информации в триггер на выводы 3,4 одновибратора 5D подается объединенный сигнал состояния триггера с выхода микросхемы 4Е.
Защита по току транзисторов высоковольтного модулятора реализована по принципу магнитного компаратора тока, выполненного на трансформаторе Т1 с прямоугольной петлей гистерезиса. Обмотки I, II включены последовательно с транзисторами V3, V4 высоковольтного модулятора. В обмотку III от источника "Uoп-15 В" через резистор R34 задается ток уставки, который вводит сердечник трансформатора в глубокое насыщение. В нормальном режиме работы токи в обмотках I, II создают в сердечнике напряженность магнитного поля меньшую, чем в обмотке III, поэтому перемагничивания сердечника не происходит и сигнал на выходе обмотки III примерно равен нулю. В аварийных ситуациях (короткое замыкание в нагрузке или сквозной ток через транзисторы V3, V4 высоковольтного модулятора) происходит перемагничивание сердечника, и на обмотке III формируется импульс напряжения положительной полярности, который открывает транзистор V18. Импульс с коллектора V18 поступает на вход S триггера 6С, в результате опрокидывания триггера светится индикатор V17 и блокируется управление высоковольтным модулятором по сигналу 3. На вход триггера 6С поступает также сигнал от схемы защиты по току источника питания силовых ключей (транзистор V45), вызывая такое же действие, как описано выше. Схема исполнения защиты формирует сигналы Уст.ВП из сигналов схемы индикации защиты и схемы запуска источника, и сигнал защиты 3 - из сигналов схемы индикации защиты и схемы защиты по току. Сигнал схемы индикации защиты в контрольном режиме (обрыв цепи сигнала БЗ) блокируется. Сигнал схемы защиты по току приводит к формированию сигнала 3 во всех режимах.Схема контроля температуры контролирует температуру самого "горячего" места в шкафу - теплоотпод, на котором размещены транзисторы регулирующих элементов импульсного и параллельного стабилизаторов 5В. При выходе из строя вентиляции внутри шкафа температура теплоотвода начинает подниматься и при достижении значения (90-5) °С формируется сигнал, по которому по выходу сигнала НН осуществляется управляемый аварийный останов и отключение тиристорного выпрямителя.
Схема контроля температуры реализована с помощью компаратора 3D, на инвертирующий вход которого поступает напряжение уставки с делителя напряжения на резисторах R53, R54, а на другой вход - напряжение с датчика температуры, в качестве которого используется переход база-эмиттер транзистора V30. Величина уставки устанавливается подстроечным резистором R54 или подбором величины резистора R99 по разности напряжений между КТ43 и КТ42 на уровне от 130 до 140 мВ при температуре радиатора источника 20 °С. Эта уставка соответствует температуре срабатывания (90±5) °С. Выход схемы контроля (выход компаратора 3D) температуры воздействует на компаратор 2В, который также формирует сигнал НН, и на светодиод V31(плата ПС251).
Источник оперативного напряжения представляет собой две трехфазные нулевые схемы выпрямления с конденсаторными фильтрами на выходе и диодами перехвата на напряжения ±15 В. На вход его поступает переменное трехфазное напряжение частотой 50 Гц с действующим напряжением примерно 10 В. На выходе формируется оперативное напряжение Uoп-15 В , которое используется для питания низковольтной части схемы блока ИП. С момента начала функционирования стабилизатора 15 В цепи оперативного напряжения подключаются к источникам 15 В и минус 15 В через схему перехвата на диодах V52, V53.
Для повышения надежности защиты в блоке ИП применены два источника эталонного напряжения Uэт+5 В. Наличием раздельных эталонов для стабилизаторов и для защиты обеспечивается контроль самих элементов источников эталонных напряжений. В качестве эталонов напряжения используется интегральный стабилизатор типа КР142ЕН5А, который обеспечивает выходное напряжение (5±0,1) В.
В электроприводе предусмотрены следующие вилы защиты:
1. защита от перегрузки по току транзисторных и тиристорного инверторов;
2. защита инверторов от перенапряжения;
3.защита двигателей и. преобразователей от перегрева;
4. защита от превышения допустимого для данной частоты вращения значения вращающего момента;
5. защита от включения в сеть с обратным порядком чередования фаз;
6. защита привода и механизмов при отключении напряжения питающей сети;
7. защита от обрыва или коротких замыканий цепей каждого из фазовращателей (датчиков угла поворота вала двигателя);
8. защита элементов в блоках управления при установке блока на непредназначенное для него место в кассете.
В электроприводе реализованы следующие виды контроля:
1. контроль функционирования источника питания датчиков тока;
2. контроль функционирования источника питания фазовращателей;
3. контроль источников напряжений 5 В, 15 В, минус 15 В и источника для питания силовых ключей по уровню напряжения и по допустимому значению тока нагрузки;
4. контроль температуры теплоотвода источника вторичных напряжений;
5. контроль функционирования источника опорного напряжения ШИМ.